stARkit for Cross-platform
工作流程
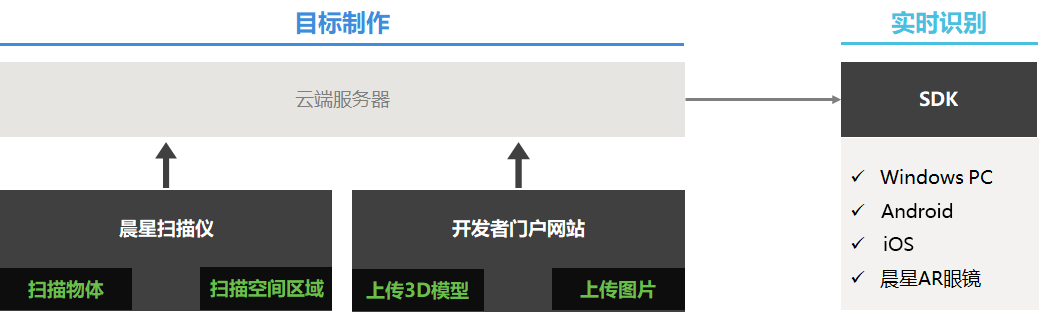
基于stARkit for Cross-platform的识别包含两个步骤:
制作目标。针对待识别对象进行数据采集(上传或扫描),然后在后台服务器进行离线训练,生成目标特征文件。
实时识别。将待识别目标对应的特征文件导入设备,基于相机实时视频流识别目标,估计其空间位姿,进而实现虚实叠加。
stARkit for Cross-platform包括三部分——晨星扫描仪、开发者网站和SDK。
晨星扫描仪负责采集待识别三维物体的信息并上传到平台云端,通过训练生成识别所需的特征数据;
开发者网站负责用户管理目标,以及用户上传数据制作目标;
stARkit for Cross-platform SDK则运行在设备上,负责从云端加载特征数据,并进行识别与跟踪,实时输出相机与目标在三维空间中的相对姿态(位移和旋转)。
支持的识别对象
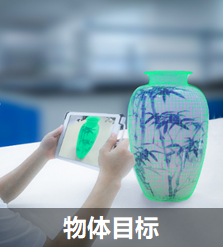
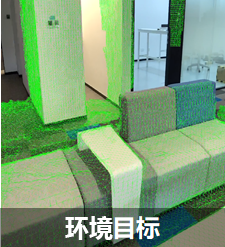
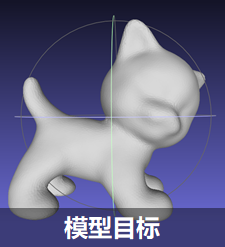
stARkit for Cross-platform支持4类目标的识别与追踪。包括物体目标、环境目标、图片目标和模型目标。
- 物体目标: 普通3D物体,通过3D扫描仪采集数据生成的识别目标,需要其具有丰富纹理的物体。
- 环境目标:一个空间区域,通过晨星扫描仪采集数据生成的识别目标。
- 图片目标:通过上传图片生成的识别目标,将图片按设定尺寸打印后可识别。
- 模型目标:通过上传物体3D模型生成的识别目标,可识别模型对应的实物。
产品性能与工作条件说明
| 目标类型 | 规格说明 |
|---|---|
 | 物体属性:不透明刚体,纹理丰富且不重复 |
 | 空间环境属性:纹理丰富且不重复,避免大片玻璃等反光材质,扫描路线避免重复场景。 |
 | 物体属性:不透明刚体 |
 | 物体属性:无形变的打印图片,纹理丰富且不重复 |
目标制作
物体目标
用户想识别一个物体,但没有其对应的3D模型,可以基于扫描的方式来制作识别目标。 该类型目标需要首先使用晨星扫描仪扫描采集待识别目标的数据后,上传到云端进行训练处理,进而生成目标识别信息,然后即可在平台网页端进行管理操作。 目标管理操作见这里。晨星扫描仪的使用方法参考此处。
环境目标
若需要识别的对象为一个空间环境区域,其制作目标的方式和物体目标类似,仅需在扫描仪中右上角切换为环境模式即可。需要注意的是环境扫描时,扫图的人扫描的范围(包含垂直高度,远近)要涵盖住识别的人使用的范围, 同一个面尽量避免不同角度反复扫描,这样重定位的位姿精度会高些。
模型目标
模型目标通过在平台网页端上传目标对应的3D模型。在项目中点击“物体识别目标物”进入上传资源页面,再点击右上方"上传"-"模型"按钮,在弹出的对话框内填写目标名称后,选择本地模型文件和模型文件的单位,点击上传模型,即可将模型和相关信息上传到云端,从而进行自动处理,生成识别目标。
注意:模型文件格式目前支持obj、fbx和dae。若该识别应用是运行在AR眼镜,请务必选择正确的模型单位
图片目标
图片目标是指用户在平台上传一张图片,经云端自动处理后生成可用于stARkit for Cross-platform SDK识别的目标。然后用户将该图片打印出来后,SDK可直接识别打印的图片,进行叠加各种虚拟的信息。图片目标的制作流程与模型目标基本一样,仅在于上传时选择图片即可。
注意:若该识别应用是运行在AR眼镜,请务必填写正确的打印图片宽度
目标管理和下载
在项目页面点击“物体识别目标物”,进入目标管理页面后,可以看到当前项目中的所有目标及其信息。上述各类目标在经过平台处理后,显示为可用状态时,可以通过目标列表右侧的“下载”按钮,将制作好的目标下载到本地电脑中,用于后续的应用开发。
下载的目标为tag[id]_[rand_string].zip的形式,请不要更改文件名和内容。

基于Unity SDK进行物体识别应用开发
在Assets/Recognition/TargetReco中,提供了4个目标识别与跟踪的示例场景(见Assets/Recognition/TargetReco/Tutorial/Scenes),双击打开后既可在unity editor中修改配置运行或编译。
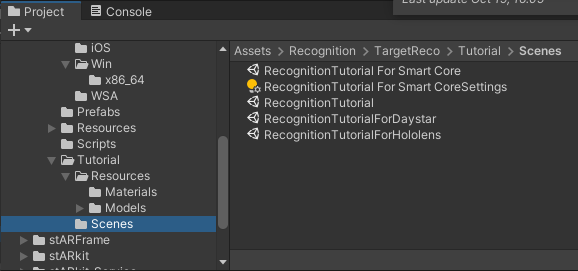
RecognitionTutorial For Smart Core:支持通用Android和iOS设备的目标识别示例场景。
RecognitionTutorial:支持PC端及unity editor的目标识别示例场景。
RecognitionTutorialForDaystar:支持晨星眼镜设备的目标识别示例场景。
RecognitionTutorialForHololens:支持HoloLens设备的目标识别示例场景。
若需要自己制作场景,请参考以下步骤,下列步骤以Unity2020.3.8f1c1为示例,不同版本unity的界面或选项存在一定差异。
开发场景配置
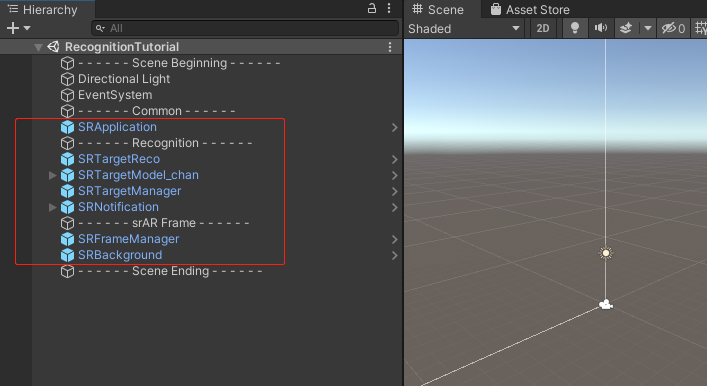
在Unity下方的项目窗口中,找到相关的预制件,将其拖拽添加到Unity场景中,注意各个预制件的层级,添加后状态见下图红框。需要添加的预制件包含:
/Assets/Common/Prefabs/SRApplication.prefab
/Assets/stARFrame/Prefabs/SRFrameManager.prefab
/Assets/stARFrame/Prefabs/SRBackground.prefab(D_ARFoundation和无SLAM的D_WebCamera设备必选)
/Assets/Recognition/TargetReco/Prefabs/SRTargetReco.prefab
/Assets/Recognition/TargetReco/Prefabs/SRTargetManager.prefab
/Assets/Recognition/TargetReco/Prefabs/SRNotification.prefab (可选)
具体配置:
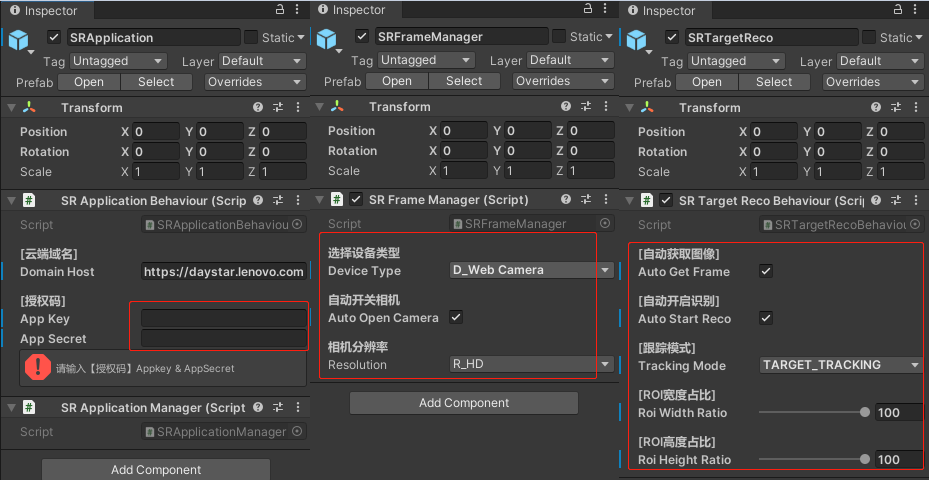
点击场景中的SRApplication,并在右侧属性列表输入服务器网址以及应用的APP Key和Secret,请务必填入自己APP对应的Key和Secret,获取途径参考此处。
点击SRFrameManager,选择相应的设备类型。SRTargetReco建议使用如图配置。
添加目标到场景中
点击场景中的SRTargetManager,右侧属性面板点击"添加目标"按钮,在弹出的对话框中,找到从开发者网站下载的目标文件zip包,点击"打开"即可将该目标添加到场景中,加载一个SRTargetModel_tag[xxx]预制件。同时在SRTargetManager面板的目标列表会显示当前场景中的目标,通过点击“删除”按钮可将对应目标移除。
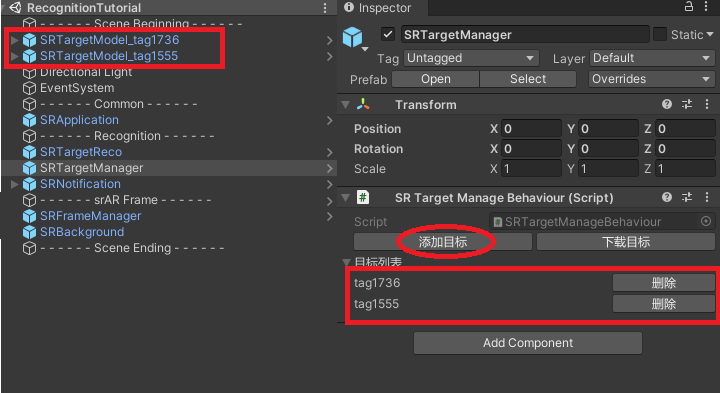
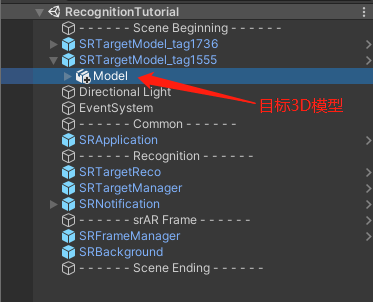
叠加虚拟模型
如上述操作添加目标后,相应SRTargetModel预制件中会附着一个目标3D模型作为子物体,此处可以根据具体业务需求,在该3D模型下挂着各种虚拟资源(模型、视频、图片等),这样在识别到该物体时便会自动显示加入的虚拟资源。
运行程序
在PC上插入一台摄像机,点击Unity顶部开始按钮,即可进行识别。或者将其打包为Windows应用运行,需要注意的是编译Windows物体识别应用前需在Project Settings->Graphics->Always Included Shaders中添加Unlit/Texture。
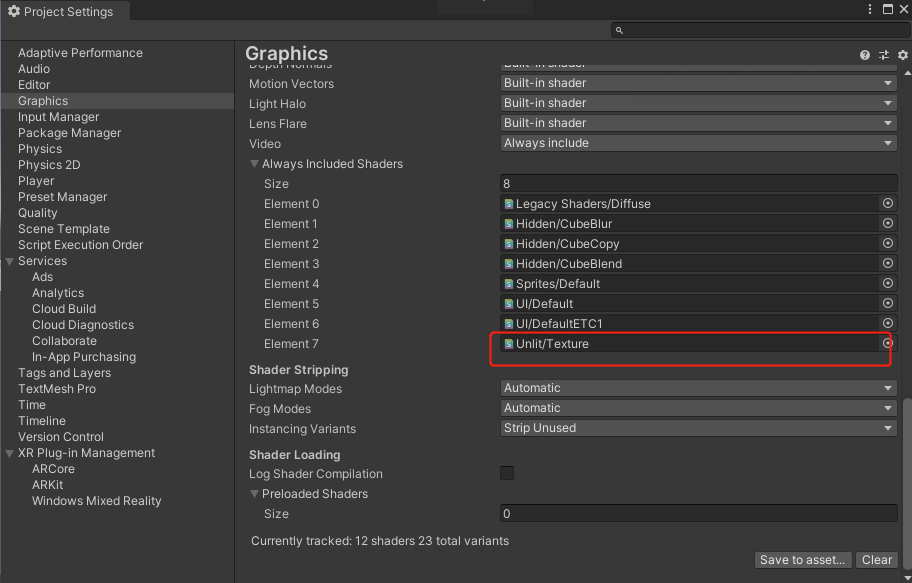
编译方法参考打包PC应用。编译完成后直接运行exe默认开启设备上第一个相机,若需要开启其他外接相机可在\“Product Name”_Data\StreamingAssets\CameraName路径下的CameraDeviceName.txt文件中指定RGB相机名字,再运行exe进行识别。
.png)
Unity SDK的环境识别应用
在Assets/Recognition/SceneReco中,提供了2个环境识别与跟踪的示例场景(见Assets/Recognition/SceneReco/Tutorial),双击打开后既可在unity editor中修改配置 运行或编译。
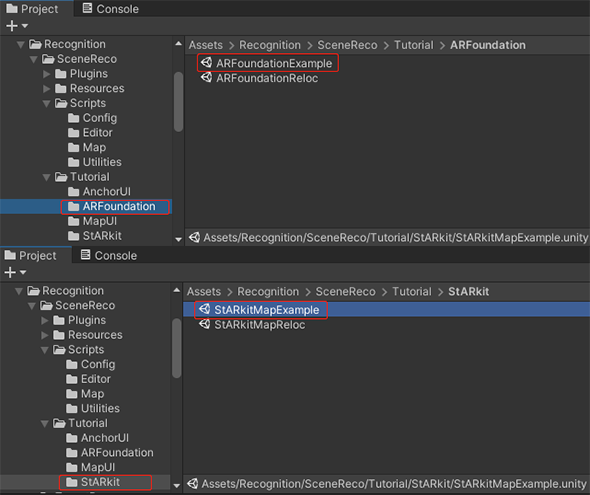
ARFoundationExample:支持通用Android和iOS设备的环境识别示例场景。
StARkitMapExample:支持晨星眼镜设备的环境识别示例场景。
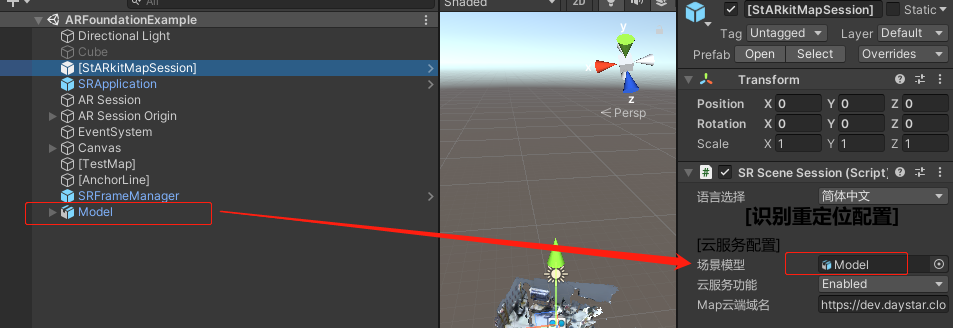
若需要做虚实叠加,可以通过晨星视觉智能平台网页下载所需的环境识别3D模型,将其置于unity场景中用于参考,确保3D模型的position和rotation在(0,0,0),再将此model拖至[StARkitMapSession]下SR Scene Session中的场景模型。
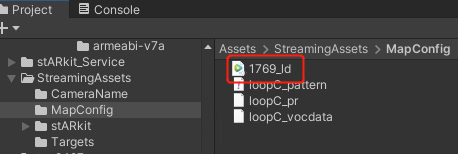
如果只用本地重定位功能需要将云端下载zip包中的xxxx_ld.dat文件放到\Assets\StreamingAssets\MapConfig路径下一起编译。
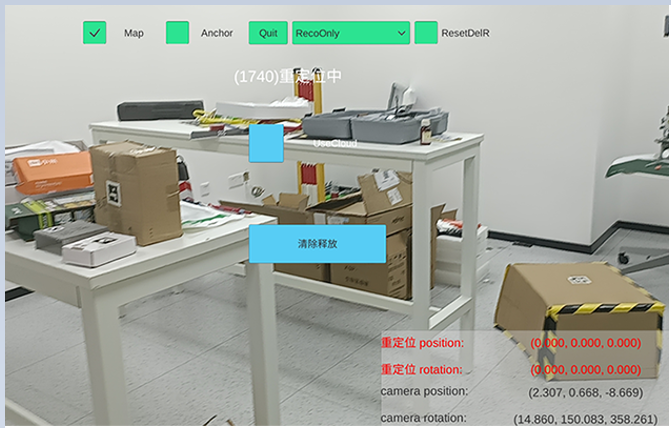
运行示例场景apk可看到如下界面,选择“Loc”,取消勾选“UseCloud”,在“请输入map id”输入框中输入id;

点击”开始识别“界面会有提示->(id)重定位中;
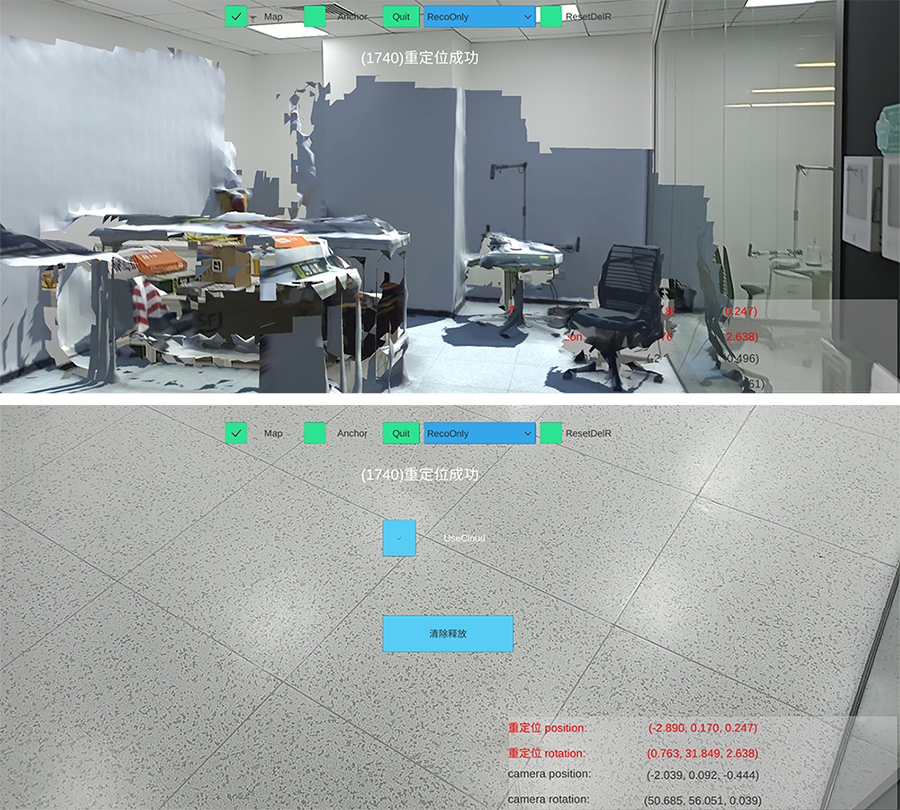
移动camera进行环境重定位,成功后界面会有提示->(id)重定位成功,同时放在上述unity开发场景中的对应model会贴附到真实环境中,也可观察屏幕右下方重定位前后的坐标信息。
云端识别+本地重定位请选择“RecoOnly”,其他选项默认。”获取云环境列表“可查看或删除晨星扫描仪上传到云端的环境目标id;
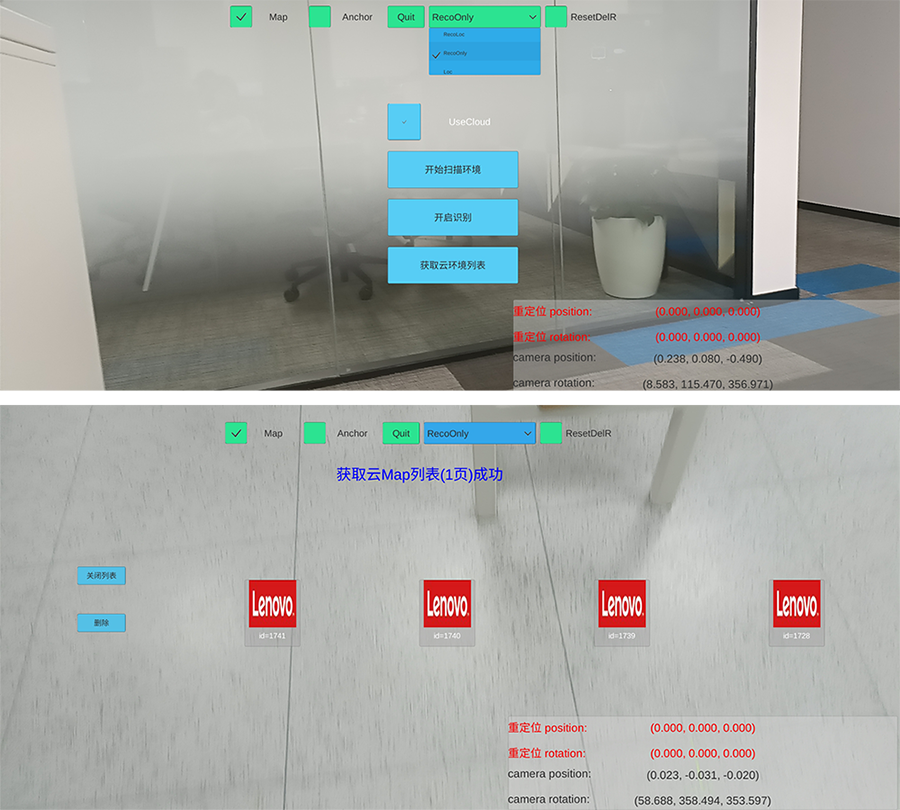
点击”开始识别“界面会有提示->正在识别中;
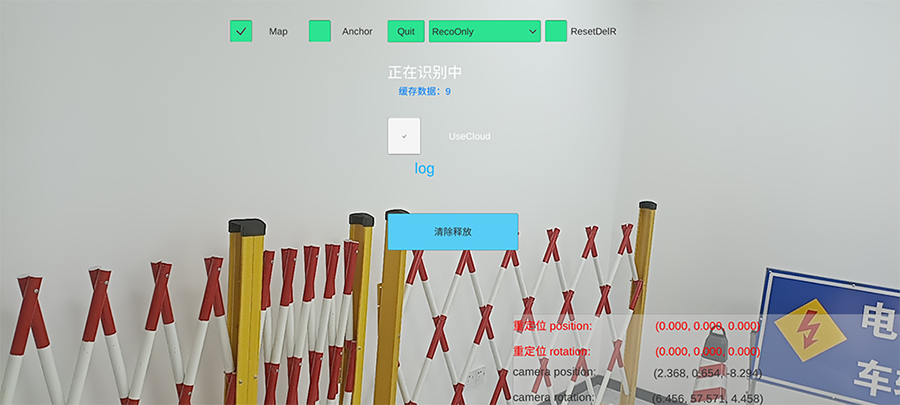
移动camera进行环境识别,识别到界面会有提示->识别成功,随后会提示->(id)重定位中;
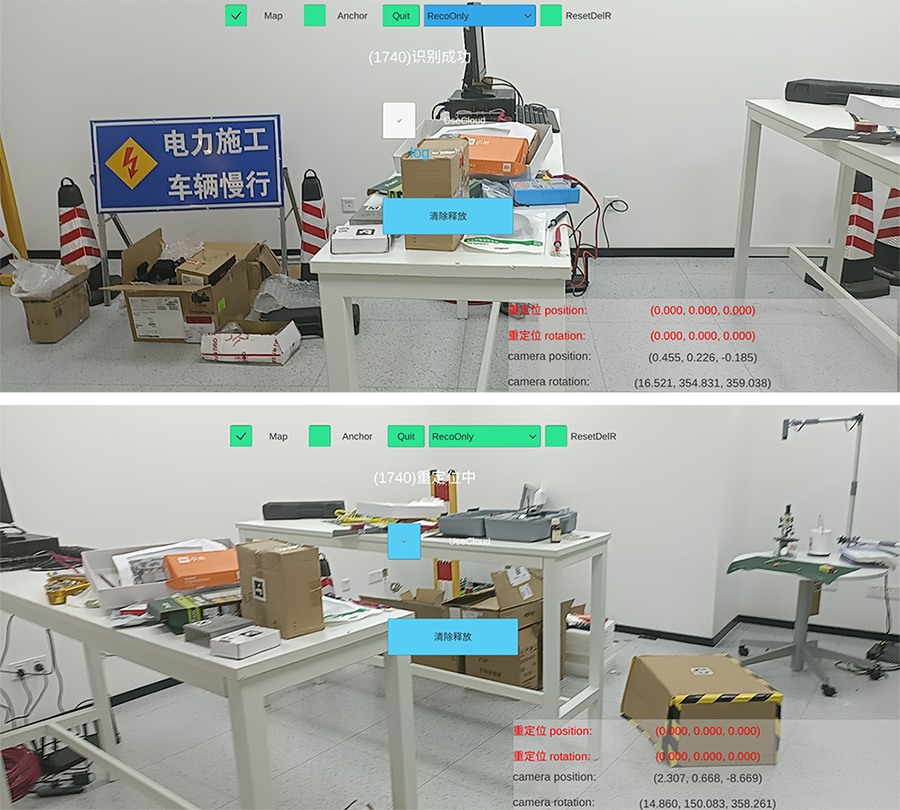
继续移动camera进行环境重定位,成功后界面会有提示->(id)重定位成功。
为通用Android设备或iOS设备开发识别应用配置
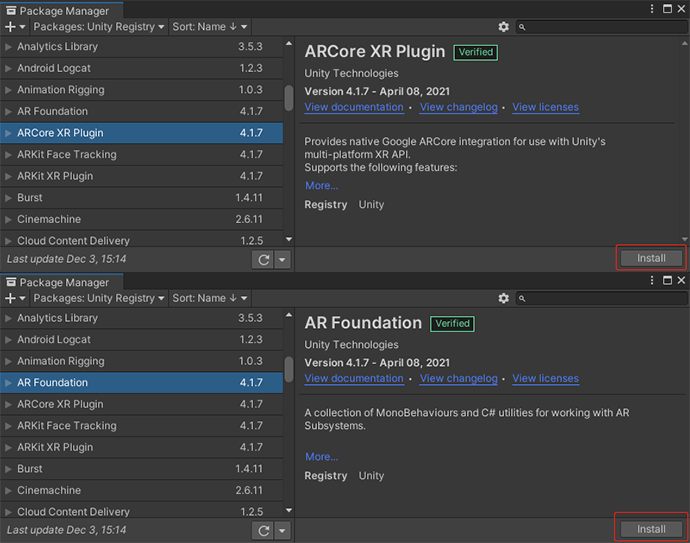
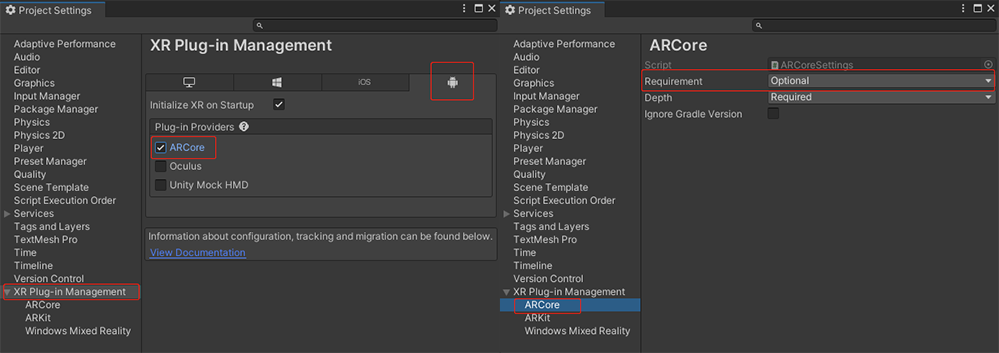
通用Android设备的开发还需要ARFoundation和ARCore的支持。
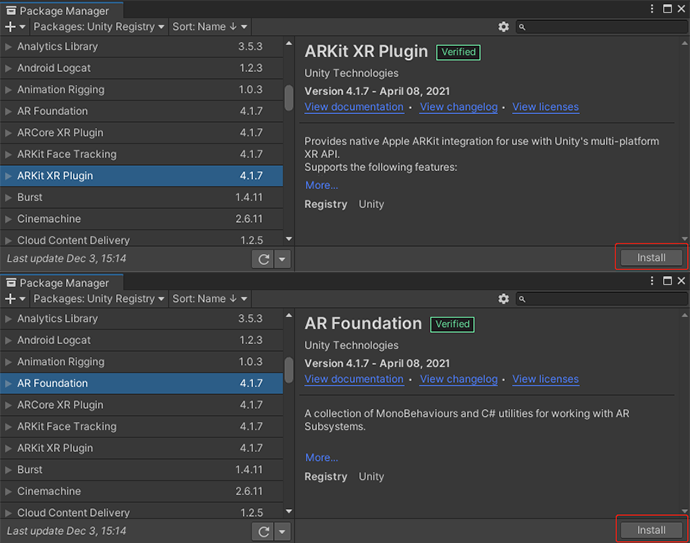
在unity菜单栏点击Window中的Package Manager,在弹出的窗口中Packages选择Unity Registry,找到AR Foundation和ARCore XR Plugin建议安装4.1.1或以上的版本,需要保证ARFoundation和ARCore的版本一致。
装好后在Project Settings面板选择XR Plug-in Management,在安卓平台勾选ARCore,ARCore中的Requirement选择Optional。
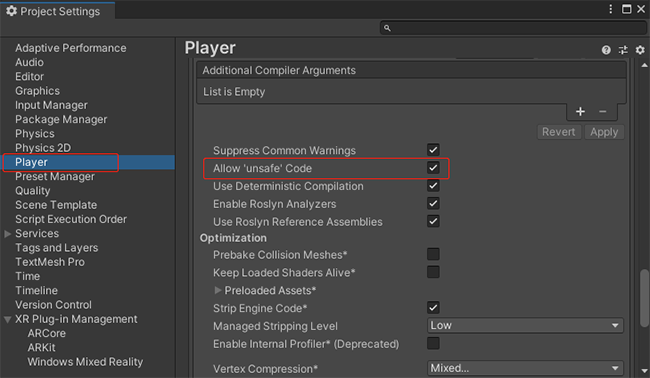
Project Settings面板选择Player,在安卓平台下展开Other Settings,将Allow 'unsafe' Code勾选上。
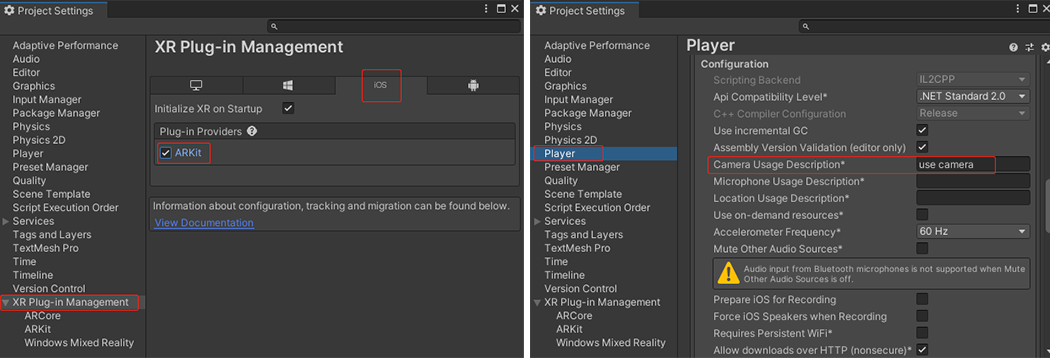
iOS设备的开发则需要ARFoundation和ARKit的支持,与通用Android的配置大同小异,按如图配置:
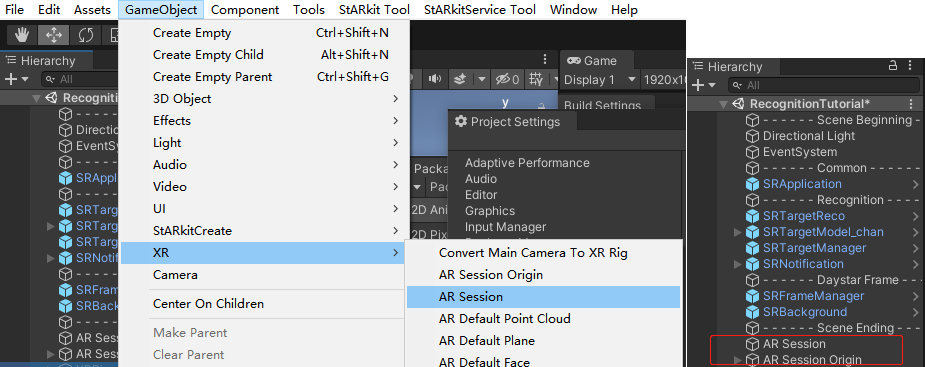
要为通用Android或iOS开发场景,需在PC开发场景配置的基础上,将SRFrameManager下的设备类型改为D_ARFoundation,并添加AR Session和AR Session Origin两个预制体,在菜单栏点击GameObject中的XR可以看到这两个预制体:
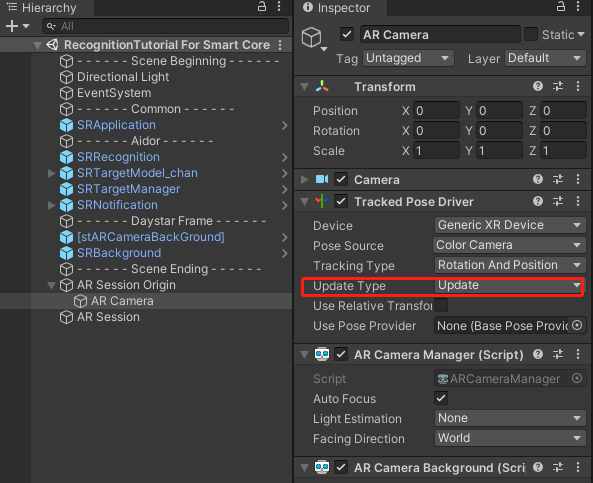
点击AR Session Origin的子物体AR Camera,将Tracked Pose Driver下的Update Type改为Update;ARFoundation较新版本,如4.1.7版本没有Tracked Pose Driver的组件,需要手动将AR Pose Driver组件替换成AR Pracked Pose Driver。
完成以上操作可将其打包为Android或iOS的应用,在相应设备上运行,SDK支持的Unity应用程序的构建及运行方式与Android、iOS的其他Unity应用程序的构建及运行方式相同。Android的具体流程见打包应用。
iOS具体流程如下:
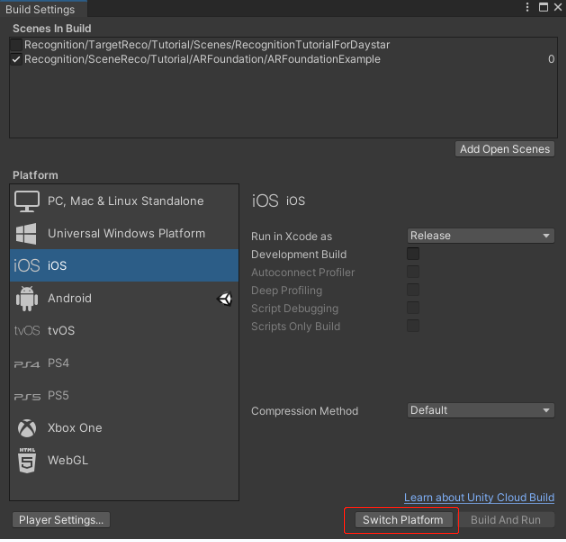
- 在Unity中,从顶部菜单中打开Build Settings(File->Build Settings)。
- 点击左侧平台列表中的iOS并选择窗口底部的“Switch Platform”。
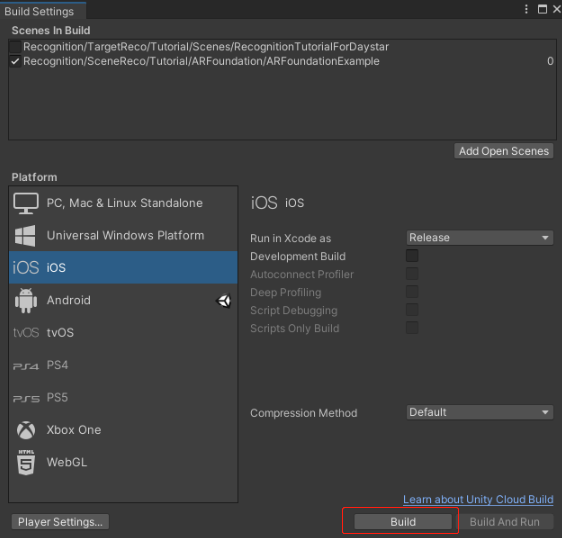
- 点击 Build 并指定路径以生成 Xcode 工程。
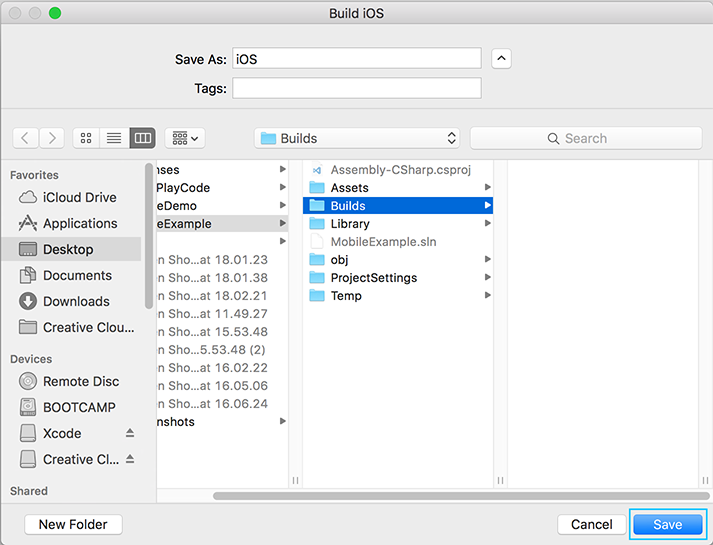
- 点击系统提示右上角的向下箭头将其展开,然后点击New Folder。
- 当系统提示选择一个名字是,输入“Builds”并点击Create。这将在你的工程的根目录下创建一个名为“Builds”的新文件夹。
- 在标记为Save As的文字输入栏中,输入“iOS”并点击Save。
- 一旦Unity构建了Xcode工程,将打一个工程位置的Finder窗口,双击.xcodeproj文件以使用Xcode打开工程。
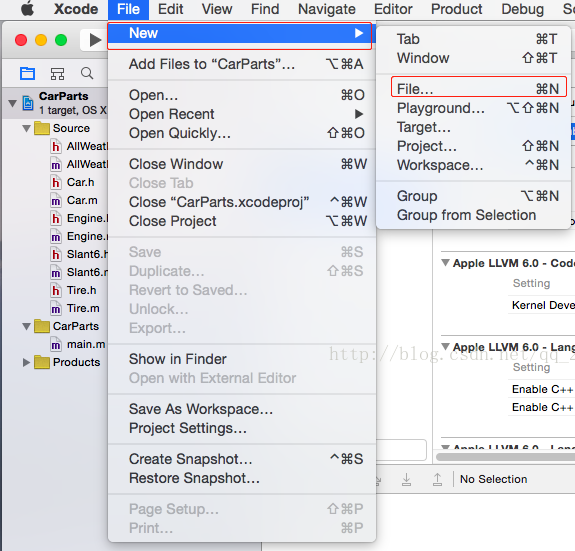
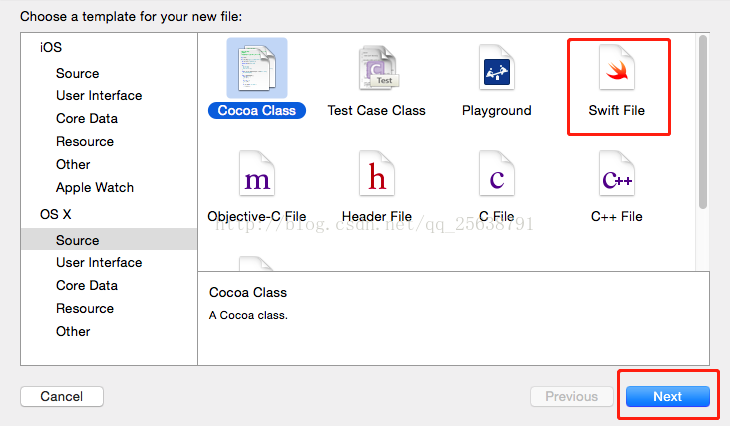
- 点击File->New->File->Swift File。
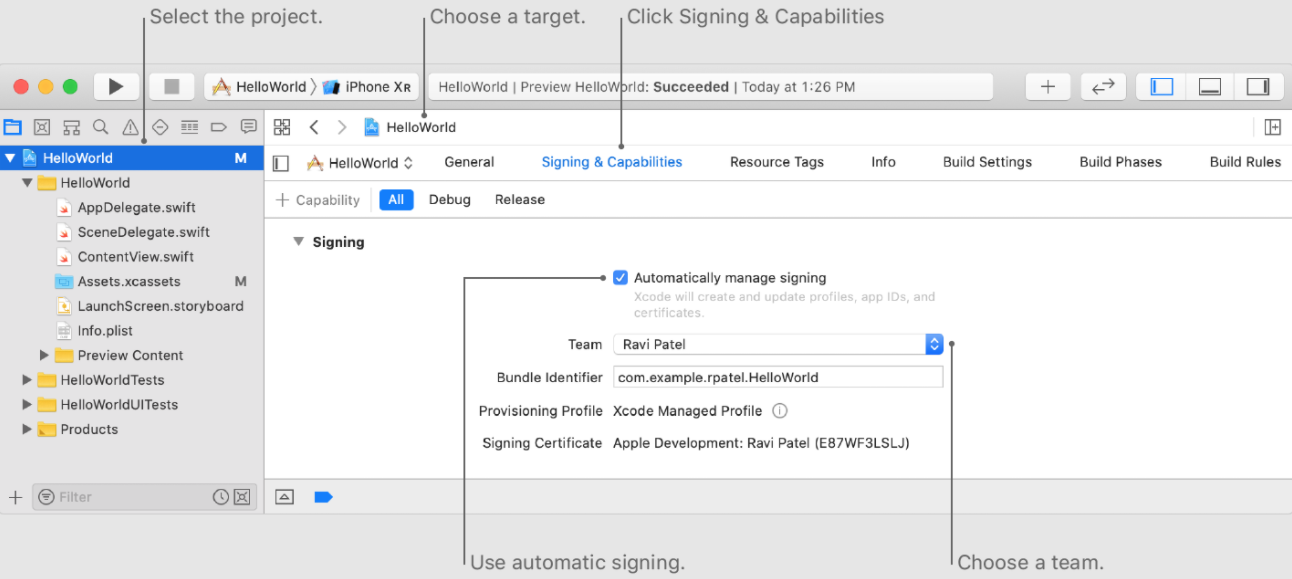
- 在左上方,选择Unity-iPhone查看工程设置。打开并选择“Signing & Capabilities”选项,勾选”Automatically manage signing“,从“Team” 弹出式菜单中选取一个团队。
- 用USB将设备连到电脑,在Xcode左上角选择自己的设备后点击Run按钮。等待Xcode顶部中心栏中显示“Build succeeded”的消息且将应用加载设备上。此时注意设备不要为锁屏状态。

Xcode构建运行到设备参阅在模拟器中或设备上运行您的 App和准备分发您的 App。
为UWP开发物体识别应用的配置
确保按照 Microsoft 的安装工具 页面安装了最低支持的 Visual Studio 和 Unity版本 。
在HoloLens上开发物体识别应用,跟踪模式建议使用ENV_TRACKING。
使用Unity2019开发HoloLens需如下配置:
将SRFrameManager下的设备类型改为D_Hololens,在场景中添加MainCamera,确保场景中有且只有一个Camera,层次结构要在根节点,Camera的Clear Flags选择Solid Color,Background用黑色(0,0,0,0)。
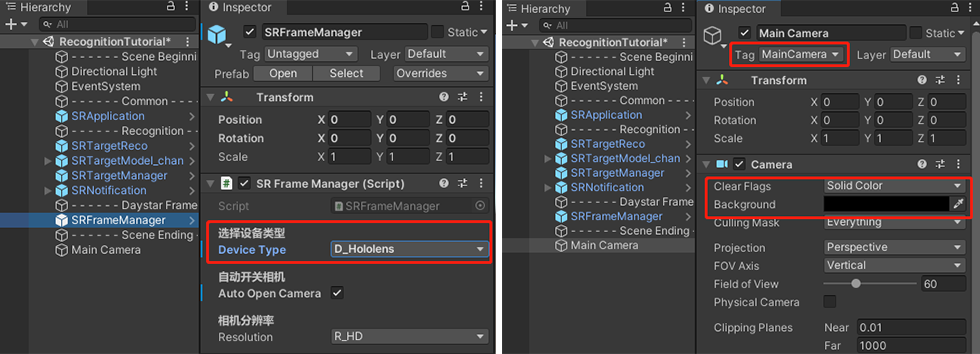
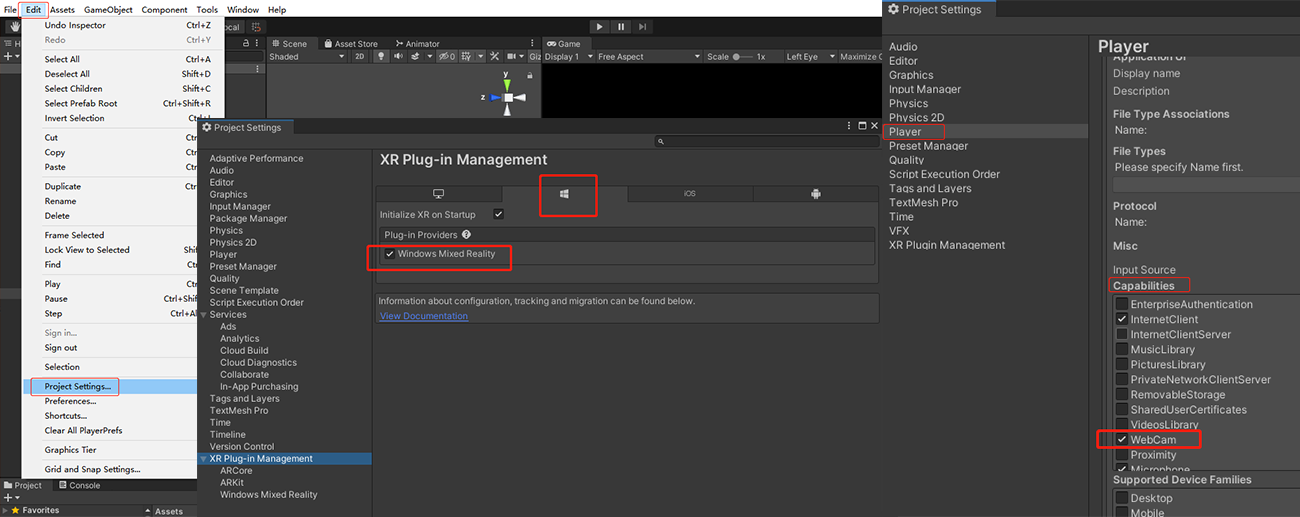
点击菜单栏Edit下的Project Settings,在弹出的面板中选择Player,展开XR Settings将Virtual Reality Supported勾选上;
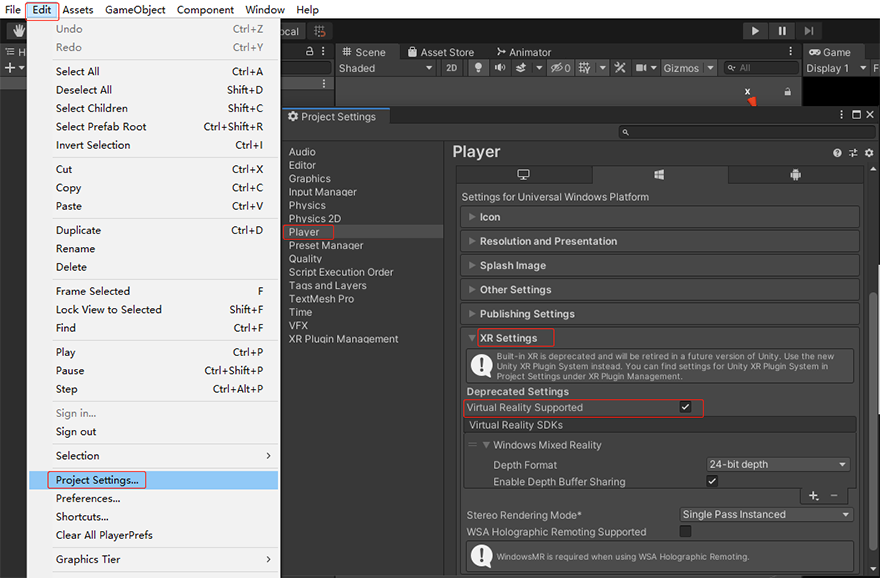
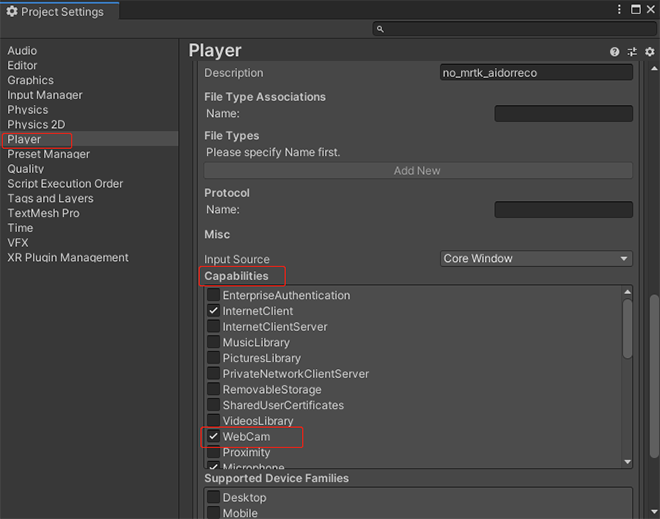
展开Publishing Settings将Capabilities下的WebCam勾选上。
使用Unity2020及以上开发HoloLens需如下配置:
在Package Manager中安装Windows XR Plugin。
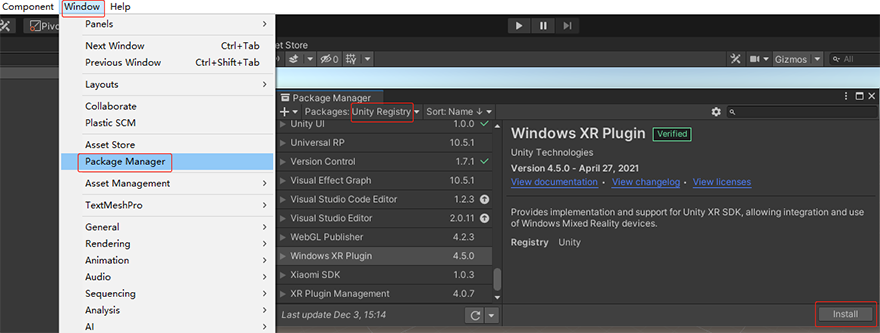
装好后在Project Settings面板选择XR Plug-in Management,勾选Windows Mixed Reality;选择Player展开Publishing Settings将Capabilities下的WebCam勾选上。
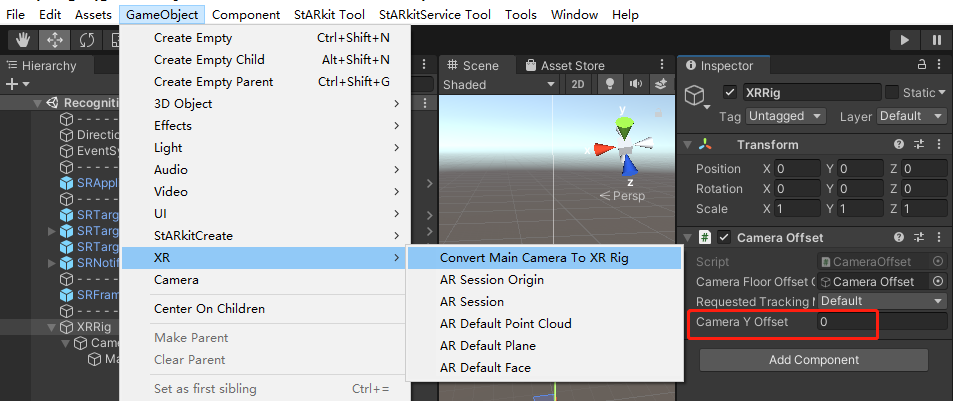
SRFrameManager中的设备类型改为D_Hololens;在场景中添加MainCamera,确保场景中有且只有一个Camera,层次结构要在根节点,Camera的Clear Flags选择Solid Color,Background用黑色(0,0,0,0),然后点击菜单栏GameObject→XR→Convert Main Camera To XR Rig,Camera Offset中的Camera Y Offset填为0。
.png)
完成以上操作可将其构建成Visual Studio工程进行UWP的打包或安装,SDK支持的Unity应用程序的构建及安装运行方式与UWP的其他Unity应用程序构建及安装运行方式相同。
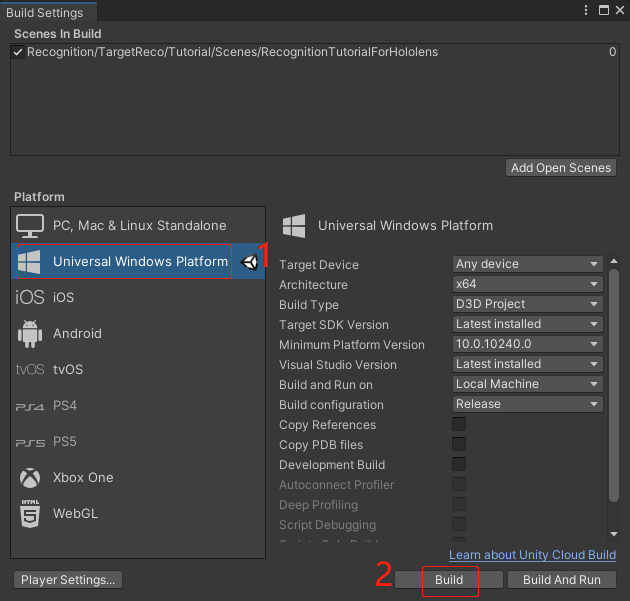
将构建平台切换到UWP,点击 Build 并指定路径生成 Visual Studio 项目,等待Unity将VS工程打包到指定路径中。(右侧参数可以全部默认,后面会在VS中修改)。
打开Build出来的VS工程(.sln文件),HoloLens2选择ARM64架构,在右侧解决方案资源管理器中选中项目并右键,选择发布(Publish)->创建应用程序包(当工程没有加载完毕时,发布中三项都是灰的,等工程加载完毕即可)。
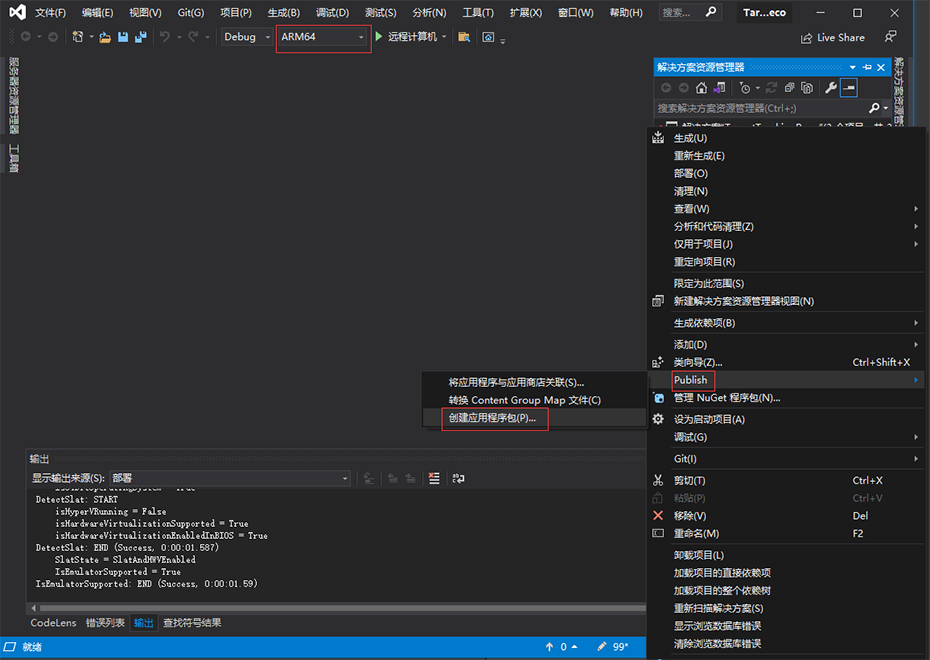
为应用程序包进行设置,选择旁加载应用,下一步,使用当前证书,下一步。
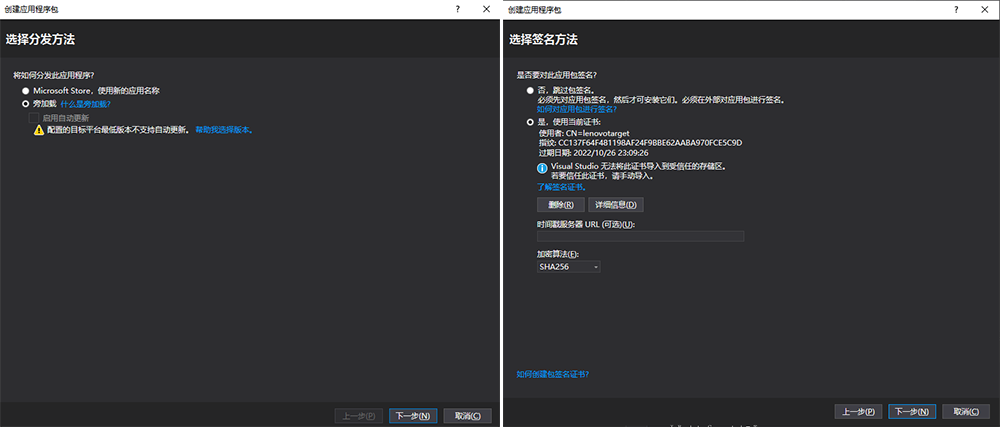
配置包,只勾选ARM64,并选择Release(ARM64),点击创建,等待创建完毕,VS会弹出如下图右侧提示框。
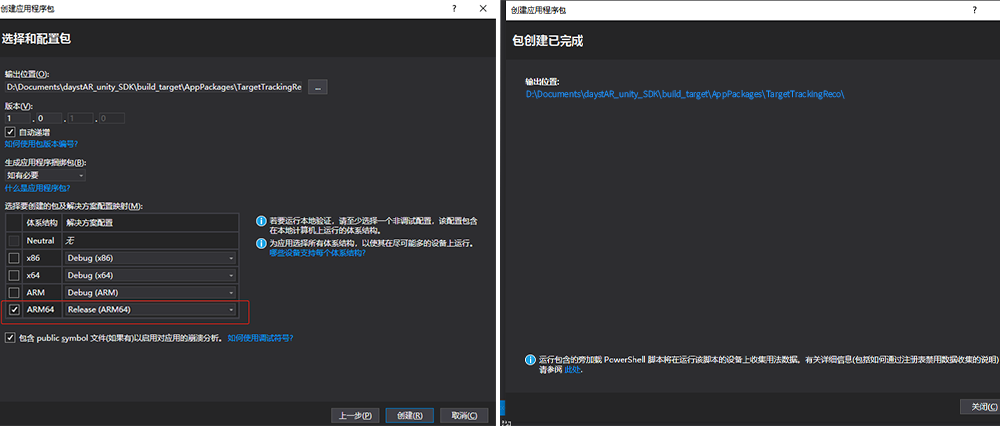
有关详细信息,请参阅 Microsoft 的 导出和构建 Unity Visual Studio 解决方案 和 使用 Visual Studio 部署和调试 教程。安装应用参见Microsoft 的使用 Windows 设备门户中的安装应用。
高级开发帮助
对于初级开发者,只需通过配置示例场景或放入并配置预制件即可完成基本的3D目标识别定位应用。但当需要在一个解决方案中使用stARkit for Cross-platform提供的功能时,应用开发者需要自行控制识别算法的启动结束时机,或者根据识别结果激活一些自定义的行为。这样的应用场景下,需要开发者主动调用SDK的接口和重新注册事件回调来实现。
unity预制件配置说明
| SRApplication | SDK 通用预制件 |
|---|---|
| Domain Host | 设置平台网站域名,通常为https://daystar.lenovo.com, 私有云用户的具体修改值需联系服务器管理员 |
| App Key | 需要识别的APP对应的Key |
| App Secret | 需要识别的APP对应的Secret |
| SRFrameManager | SDK 通用预制件 |
|---|---|
| Device Type | 设备类型 |
| Display Mode | M_Video_See: 视频透视模式,通常PC、手机平板等需要选择该模式 |
| Camera ID | 相机设备ID。通常为从0开始的整数 |
| Resolution | 相机分辨率 |
| Auto Open Camera | 是否自动开关相机 |
| SRTargetReco | TargetReco预制件 |
|---|---|
| AutoGetFrame | True:自动获取图像,无需用户传图像 False:用户需自主传入图像帧 |
| AutoStartReco | True:应用启动时自动开始识别 False:用户手动调用接口开启识别 |
| SRTrackingMode | TARGET_TRACKING:物体跟踪,建议在手机、PC等设备上使用 |
| Roi Width Ratio | 识别感兴趣区的宽度与图像宽度比例 |
| Roi Height Ratio | 识别感兴趣区的高度与图像高度比例 |
| SRTargetModel | TargetReco预制件 |
|---|---|
| Tag | 目标唯一标识,由云端系统生成 |
| Auto Add Target | 自动加载目标,取消勾选后需用户自行调用接口加载,适合高级开发者使用 |
| Auto Enable Target | 自动激活目标,取消候选后需用户自行调用接口激活 |
| [StARkitMapSession] | SceneReco预制件 |
|---|---|
| 场景模型(Scene Model) | 环境识别id对应的模型 |
| 云服务功能(Cloud service function) | Enabled:启用云服务 Disable:禁用云服务 |
| Map云端域名(Map cloud domain name) | 同SRApplication平台网站域名 |
TargetReco接口调用
stARkit for Cross-platform SDK中TargetReco提供的接口类为SRTargetRecoBehaviour,该类提供了实例获取方法public static SRTargetRecoBehaviour Instance(),通过该方法获取类实例后即可调用其中的接口控制算法行为。其中控制识别算法的接口主要有:
目标操作接口
//========================================================
//action有4种类型:
// TARGET_ACTION_ADD —— 加载目标
// TARGET_ACTION_REMOVE —— 删除目标
// TARGET_ACTION_ENABLE —— 激活目标
// TARGET_ACTION_DISABLE —— 冻结目标
//========================================================
public void TargetDoAction(string tag, SRTargetAction action);一个目标需要先被加载,然后激活后才可以被识别和跟踪。
但一个目标暂时不需要识别时,可以将其冻结,若后续都不再需要使用,则建议将其删除以节约系统资源。一个目标被加载后默认处于冻结状态。
在RecognitionTutorial的SRTargetBehaviour.cs脚本文件中有调用示例。
识别流程控制接口
//========================================================
//暂停识别,调用接口后,识别回调事件将不会被触发
//========================================================
public void TargetRecoPause();
//========================================================
//恢复识别
//========================================================
public void TargetRecoResume();TargetReco自定义回调事件
stARkit识别在每个主要接口调用完成后,会触发相应的回调事件。用户可以通过注册回调的方式触发自定义行为。
SDK初始化完成
在SDK初始化完成后会触发,通常仅在应用启动后触发一次。该事件在SRTargetBehaviour.cs脚本有调用示例,用于在初始化完成后自动加载目标。
回调事件:SRTargetRecoBehaviour.InitializeEvent
回调函数:void SRInitializeFinishedCallback(int errCode);
参数说明:errCode —— 初始化错误码,0:成功, 非0:失败目标操作完成
每次目标操作完成后触发。该事件在SRTargetBehaviour.cs脚本有调用示例,用于加载目标后自动激活目标。
回调事件:SRTargetRecoBehaviour.DoActionEvent
回调函数:void SRDoActionFinishedCallback(int errCode, string tag, SRTargetAction action);
参数说明:errCode —— 初始化错误码,0:成功, 非0:失败
tag —— 操作目标的tag
action —— 操作类型SDK销毁完成
在SDK销毁完成后会触发,通常仅在应用退出前触发一次
回调事件:SRTargetRecoBehaviour.DestroyEvent
回调函数:void SRDestroyFinishedCallback(int errCode);
参数说明:errCode —— 初始化错误码,0:成功, 非0:失败单帧识别完成
每帧识别完成后都会触发一次,可根据回调的识别目标信息来判断该帧图像的识别情况。该事件在SRTargetBehaviour.cs脚本有调用示例,在每帧识别完后,实时更新虚拟模型的在场景中的位姿信息。
回调事件:SRTargetRecoBehaviour.TargetPoseChangedEvent
回调函数:void SRTargetPoseChangedCallback(int errCode, SRAugTargets augTargets, IntPtr usrData);
参数说明:errCode —— 初始化错误码,0:成功, 非0:失败
augTargets —— 识别出的目标以及其位姿信息
usrData —— 用户自定义信息,默认情况为识别图像帧的一些附加信息TargetReco自定义相机数据
默认情况下,stARkit for Cross-platform SDK会自动打开相机获取画面进行识别,在某些情况下,开发者需要多个模块共用一个相机,因此需要其自行控制相机的开关,并将图像数据传到stARkit for Cross-platform SDK中。 SDK中提供了一个接口供外部传入图像数据:
void SubmitFrame(ref SRRecoFrame frame);
frame —— 图像帧数据同时,若要主动调用该接口,需要在SRTargetReco prefab中把“自动获取图像”的复选框去除勾选。
TargetReco其他接口说明
stARkit for Cross-platform SDK 接口中还提供了2个接口,用于获取SDK相关的状态:
SDK版本获取接口
//用于获取算法SDK的版本信息
public string GetVersion();错误描述信息获取接口: 每个回调事件中都会附带一个错误码,用于标识本次接口调用是否成功,当错误码非0时,可以调用GetErrorDescription函数获取错误信息,辅助定位失败原因。
//获取错误码对应的描述
public string GetErrorDescription(int errCode);SceneReco接口调用
stARkit for Cross-platform SDK中SceneReco提供的接口类为SRSceneRecoBehaviour,该类提供了实例获取方法public static SRTargetRecoBehaviour Instance(bool cloud),参数为是否使用云服务,通过该方法获取类实例后即可调用其中的接口控制算法行为。其中控制识别算法的接口主要有:
识别流程控制接口
//========================================================
//开启识别或重定位
//"relocTimeoutMS":识别或重定位的时长
//"mapid":-2 识别加重定位,-1 仅识别;>=0 仅重定位
//"localMapPathDirectory":本地存放id特征文件的路径
//========================================================
public virtual SRRestultCode SceneRecoStart(float relocTimeoutMS,int mapid=-2,string localMapPathDirectory = null)
//========================================================
//停止识别或重定位
//========================================================
public virtual SRRestultCode SceneRecoStop()//========================================================
//获取环境id列表
//========================================================
public virtual SRRestultCode GetSceneList(int pageNo, int pageSize)
//========================================================
//根据环境id删除对应特征文件
//========================================================
public virtual SRRestultCode DeleteSceneData(int mapId)//========================================================
//传数据
//========================================================
public virtual SRRestultCode SubmitFrame(SRFrameData[] frameDatas,List<byte[]> datas)SceneReco自定义回调事件
stARkit环境识别提供了一组注册接收回调和取消回调注册。用户可以通过注册回调的方式触发自定义行为。
//========================================================
//注册接收回调
//"SRBaseSceneRecivedData":识别或重定位过程中的状态信息
//========================================================
public void RegisterRecived (Action<SRBaseSceneRecivedData> recived)
//========================================================
//取消回调注册
//========================================================
public void UnRegisterRecived(Action<SRBaseSceneRecivedData> recived)