关于晨星机器人
晨星机器人产品列表
| 型号 | GS | IS Lite | IS | |
|---|---|---|---|---|
| 渲染图 |  |  |  | |
| 机械参数 | 站立尺寸 | 1150×660×610 | 960×472×480mm | 960×472×520mm |
| 关机趴下尺寸 | 1190×660×310 | 1030×480×190mm | 1030×480×240mm | |
| 带电池重量 | 68.5kg | 30±2kg | 30±2kg | |
| 材质信息 | 铝合金+ 高强度工程塑料 | 铝合金+ 高强度工程塑料 | 铝合金+ 高强度工程塑料 | |
| 电气参数 | 供电电压 | 36V~50.4V | 39V~54.6V | 39V~54.6V |
| 性能参数 | 载荷 | ≈70kg | ≈10kg | ≈10kg |
| 运动速度 | 0~1.6m/s | 0~2.5m/s | 0~2.5m/s | |
| 最大攀爬落差高度 | <30cm | <20cm | <20cm | |
| 最大攀爬斜坡角度 | 45° | 45° | 45° | |
| 基础算力 | 酷睿i7+orin NX | orin NX | 酷睿i7+orin NX | |
| 续航时间 | 2.5~4h | 2~3h | 2~3h | |
| 关节参数 | 最大关节扭矩[1] | 约120Nm | 约50Nm | 约50Nm |
| 关节电机 | 18个 | 18个 | 18个 | |
| 膝关节内走线 | √ | × | √ | |
| 传感器配置 | 激光雷达 | √ | √ | √ |
| 高清相机 | √ | √ | √ | |
| 功能列表 | 基础运动 | √ | √ | √ |
| 安全保护与警告 | √ | √ | √ | |
| 充电桩回充 | √ | × | √ | |
| 自主定位 | √ | × | √ | |
| 导航规划 | √ | × | √ | |
| 自主停障 | √ | × | √ | |
| 地图构建 | √ | × | √ | |
| 配件 | 遥控器 | √ | √ | √ |
| 充电器 | 标准(33.6V 3.5A) | 标准(33.6V 3.5A) | 标准(33.6V 3.5A) | |
| 足端替换套件 | 工业防滑脚垫×6 | (可选配) | 工业防滑脚垫×6 | |
| 可拓展模块* | 双光云台、机械臂、Wapi客户端、气体传感器等 | 边缘计算主机 | 双光云台、机械臂、Wapi客户端、气体传感器等 | |
| 保修期 | 1年 | 1年 | 1年 | |
[1] 18个关节电机,最大扭矩有差异,此为其中最大关节电机的最大扭矩
[2] 空旷无干扰无遮挡环境
[3] 不同无线网络环境下,会有比较大差异
[4] 详细功能,请查看二次开发手册
[5] 更详细保修条款,请参见产品保修手册
[6] 以上参数,在不同业务场景、不同型号参数配置等情况,在应用中有所差异,请以实际为准
[7] 产品外观后续可能会有略微调整,请以届时实物为准
部件名称
GS
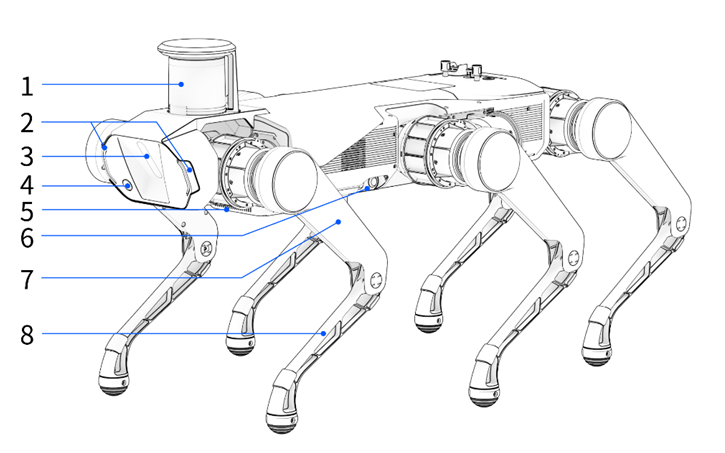
| 序号 | 说明 |
|---|---|
| 1 | 激光雷达 |
| 2 | 状态指示灯 |
| 3 | 深度相机 |
| 4 | RGB 相机 |
| 5 | 无线充电模块 |
| 6 | 航插接口 |
| 7 | 大腿 |
| 8 | 小腿 |
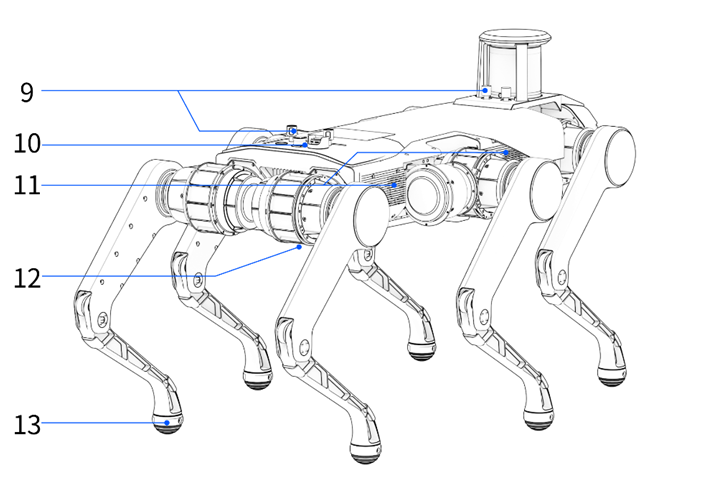
| 序号 | 说明 |
|---|---|
| 9 | 天线 |
| 10 | 电源面板(充电口,开关,急停) |
| 11 | 散热风扇 |
| 12 | 深度相机(底部) |
| 13 | 可替换防滑足端 |
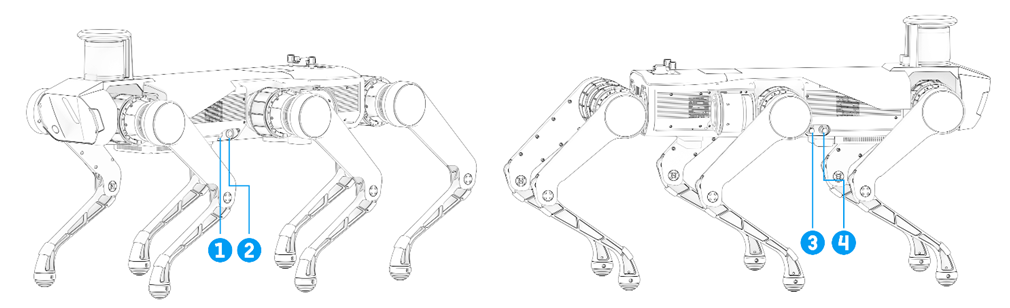
IS
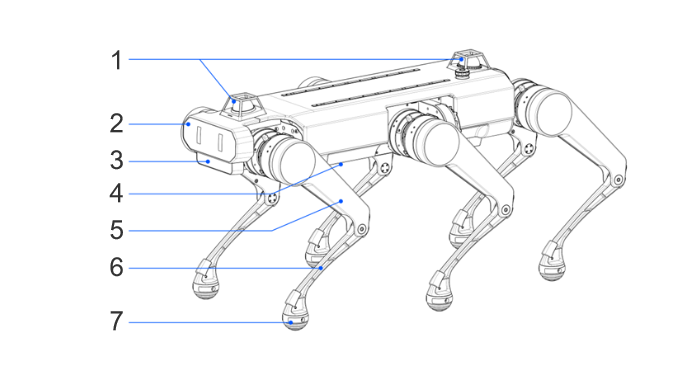
| 序号 | 说明 |
|---|---|
| 1 | 激光雷达 |
| 2 | 面部表情+状态指示灯 |
| 3 | 深度相机 |
| 4 | 充电触点(底部) |
| 5 | 大腿 |
| 6 | 小腿 |
| 7 | 可替换防滑足端 |
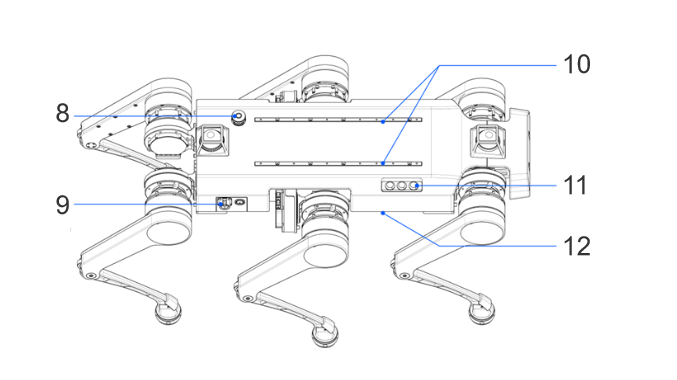
| 序号 | 说明 |
|---|---|
| 8 | 急停按键 |
| 9 | 电源面板(充电口,开关) |
| 10 | 负载加装轨道 |
| 11 | 航插接口 |
| 12 | 散热出风口(两侧下方) |
电气接口
GS
| 1 | 48V |
|---|---|
| 2 | 12V+LAN1+USB 2.0 |
| 3 | 12V+LAN2+USB 2.0 |
| 4 | 12V |
IS

| 1 | 48V+LAN1 |
|---|---|
| 2 | 12V+LAN2 |
| 3 | 12V+LAN3 |