Overview of DaystarBot
DaystarBot Product List
| Model | MC | MX | GS3.0 | IS2.0 | IS | IS Lite | |
|---|---|---|---|---|---|---|---|
| Rendered Image |  |  |  |  |  |  | |
| Mechanical Specs | Dimensions (Standing) | 630×360×465mm | (860mm~1000mm) * 500mm * 600mm (Supports leg transformation) | 1160x660x610mm | 980×484×480mm | 960×472×520mm | 960×472×480mm |
| Dimensions (Crouching) | 670×425×145 mm | (860mm~1060mm) * 580mm * 200mm (Supports leg transformation) | 1043.9×541.3×177mm | 1030×480×240mm | 1030×480×190mm | ||
| Weight (with battery) | ≈20kg | 40±1kg | 68±2kg | 37±1kg | 30±2kg | 30±2kg | |
| Material | Aluminium alloy + Composite material | Aluminium alloy + High strength engineering plastic | Aluminium alloy + High strength engineering plastic | Aluminium alloy + High strength engineering plastic | Aluminium alloy + High strength engineering plastic | Aluminium alloy + High strength engineering plastic | |
| Protection Level | IP54 | IP67 | IP67 | IP67 | IP54 | IP54 | |
| Physical E-Stop Button | √ | √ | √ | √ | √ | √ | |
| Communication | WiFi5 5GHz | WiFi5 5GHz | WiFi5 5GHz | WiFi5 5GHz | WiFi5 5GHz | WiFi5 5GHz | |
| Expansion Interface | Ethernet, USB, Power, SBUS, UART | Power, LAN Ethernet, USB, Serial (RS485) | Power, LAN Ethernet, USB | Power, LAN Ethernet, USB | Power, LAN Ethernet | Power, LAN Ethernet | |
| Electrical Specs | Battery Nominal Voltage | 43.2V | 54.00V | 61.2V | 46.8V | 46.8V | 46.8V |
| Battery Nominal Capacity | 5Ah | 10Ah * 2 | 24Ah | 18Ah | 15Ah | 15Ah | |
| Performance Specs | Payload | 15kg (static) 8kg (walking) | 75kg (static) 25kg (walking) | 70-100kg | ≈10kg | ≈10kg | ≈10kg |
| Max Speed | 3.7 m/s (5m/s customized) | 6m/s | 1.6m/s | 2m/s | 2.5m/s | 2.5m/s | |
| Max Drop Height | 16cm | 22cm | 22cm | 20cm | <20cm | <20cm | |
| Max Obstacle Height | 65cm | 80cm | 60cm | 60cm | 60cm | ||
| Max Slope Climb Angle | 30° | 45° | 45° | 45° | 45° | 45° | |
| Base Computing Power | RK3588 | RK3588+Orin NX | RK3588+Orin NX | RK3588+Orin NX | Core i7+Orin NX | Orin NX | |
| Battery Life | 1~2h | 2~4h | 2.5~4h | 2.5~3h | 2~3h | 2~3h | |
| Max Range | ≈9km | ≈20km | |||||
| Joint Specs | Max Joint Torque[1] | ≈48Nm | ≈150Nm | ≈360Nm | ≈70Nm | ≈50Nm | ≈50Nm |
| Joint Motors | 12+4 | 12+4 | 18 | 18 | 18 | ||
| Internal Knee Wiring | √ | √ | √ | √ | √ | × | |
| Tires | 6 inches | Outer Diameter 190mm | |||||
| Sensor Config | LiDAR | × | √ | √ | √ | √ | √ |
| HD Camera | √ | √ (Fisheye GSML camera x 4) | √ | √ | √ | √ | |
| IMU | √ | √ | √ | √ | √ | √ | |
| Feature List | Basic Motion | √ | √ | √ | √ | √ | √ |
| Fall Recovery | √ | ||||||
| Safety and Alerts | √ | √ | √ | √ | √ | √ | |
| Charging Dock Return | ×(Optional) | √ | √ | √ | √ | × | |
| Autonomous Localization | ×(Optional) | √ | √ | √ | √ | × | |
| Navigation Planning | ×(Optional) | √ | √ | √ | √ | × | |
| Autonomous Obstacle Avoidance | ×(Optional) | √ | √ | √ | √ | × | |
| Mapping | ×(Optional) | √ | √ | √ | √ | × | |
| Accessories | Remote Controller | √ | √ | √ | √ | √ | √ |
| Charger | √ | √ | √ | Standard(12V 2A) | Standard(33.6V 3.5A) | Standard(33.6V 3.5A) | |
| Foot Replacement Kit | Industrial Non-slip Footpads ×6 | Industrial Non-slip Footpads ×6 | (Optional) | ||||
| Expandable Modules* | 3D LiDAR (Mid-360) Perception Host (RK3588) | Robotic Arm, Dual-light PTZ, WAPI Client, 5GCPE Client, Acoustic Camera, Panoramic Camera, UWB | Dual-light PTZ, Robotic Arm, WAPI Client, Gas Sensors, etc. | Dual-light PTZ, Robotic Arm, WAPI Client, Gas Sensors, etc. | Dual-light PTZ, Robotic Arm, WAPI Client, Gas Sensors, etc. | Edge Computing Host | |
| Warranty | 1year | 1year | 1year | 1year | 1year | 1year | |
[1] There are 18 joint motors, each with different maximum torque values. The listed value represents the maximum torque among them.
[2] Open, unobstructed, and interference-free environment.
[3] Performance may vary significantly under different wireless network conditions.
[4] For detailed functionalities, please refer to the secondary development manual.
[5] For detailed warranty terms, please consult the product warranty manual.
[6] The above parameters may vary depending on application scenarios, model configurations, and usage environments. Please refer to actual conditions.
[7] Product appearance may be subject to minor changes in future iterations. Please refer to the actual delivered unit.
Component Names
MC


IS
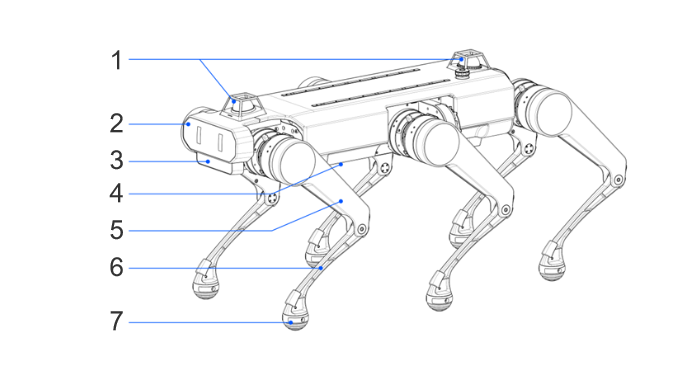
| No. | Description |
|---|---|
| 1 | LiDAR |
| 2 | Facial Expression + Status Indicator Light |
| 3 | Depth Camera |
| 4 | Charging Contacts (Bottom) |
| 5 | Upper Leg |
| 6 | Lower Leg |
| 7 | Replaceable Anti-slip Footpad |
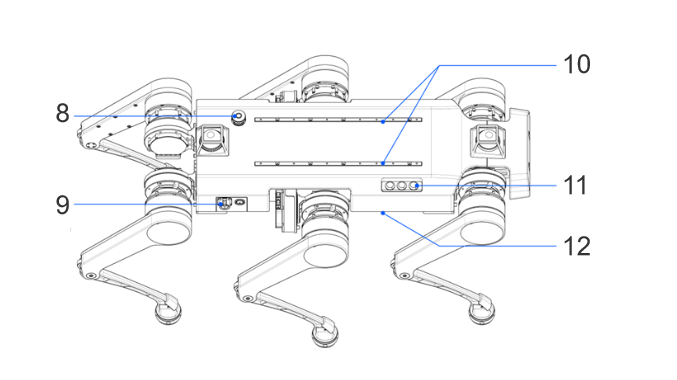
| No. | Description |
|---|---|
| 8 | Emergency Stop Button |
| 9 | Power Panel (Charging Port, Power Button) |
| 10 | Load Mounting Rail |
| 11 | Interface |
| 12 | Exhaust Vent (Both Lower Sides) |
IS2.0

| No. | Description |
|---|---|
| 1 | RGB Camera |
| 2 | Facial Expression + Status Indicator Light |
| 3 | Charging Contacts (Bottom) |
| 4 | Upper Leg |
| 5 | Lower Leg |
| 6 | Replaceable Anti-slip Footpad |
| 7 | Speaker |
| 8 | Interface |
| 9 | LiDAR |

| No. | Description |
|---|---|
| 10 | Emergency Stop Button |
| 11 | Power Panel (Charging Port, Power Button) |
| 12 | Microphone |
| 13 | Load Mounting Rail |
Electrical Interfaces
MC



IS

| 1 | 48V+LAN1 |
|---|---|
| 2 | 12V+LAN2 |
| 3 | 12V+LAN3 |
IS2.0

| Aviator Connector Interface Definition | |
|---|---|
| 1 | 12 V 4A+USB+LAN(100 Mbps) |
| 2 | 12 V 2A+WAN(1 Gbps, The Gigabit Ethernet port directly connects to the host machine (Host 105). All other Ethernet ports are connected to an internal switch within the device chassis.) |
| 3 | 48 V 4A+LAN(100 Mbps) |
| 4 | 12 V 2A+LAN(1 Gbps) |