故障
晨星机器人的工程师在设计及制造过程中付出了很多努力,但在实际使用时仍不可避免地会遇到一些意外问题。当问题出现时,会通过故障报警的形式通知操作员、开发人员和其他设备。
故障有不同类型、不同来源。可以通过APP或SDK获取当前的故障信息。
系统故障
系统故障表示机器人出现硬件或软件故障。 它们包括故障源码及故障码,并且可以 APP 或 SDK 告知用户,并在联网模式下被云服务记录。 解决这些故障需要依据具体故障代码所对应的解决方案。
行为故障
行为故障表示机器人无法执行某条指令。这通常表示机器人目前的工况不允许该指令的执行或机器人目前处于占用状态。
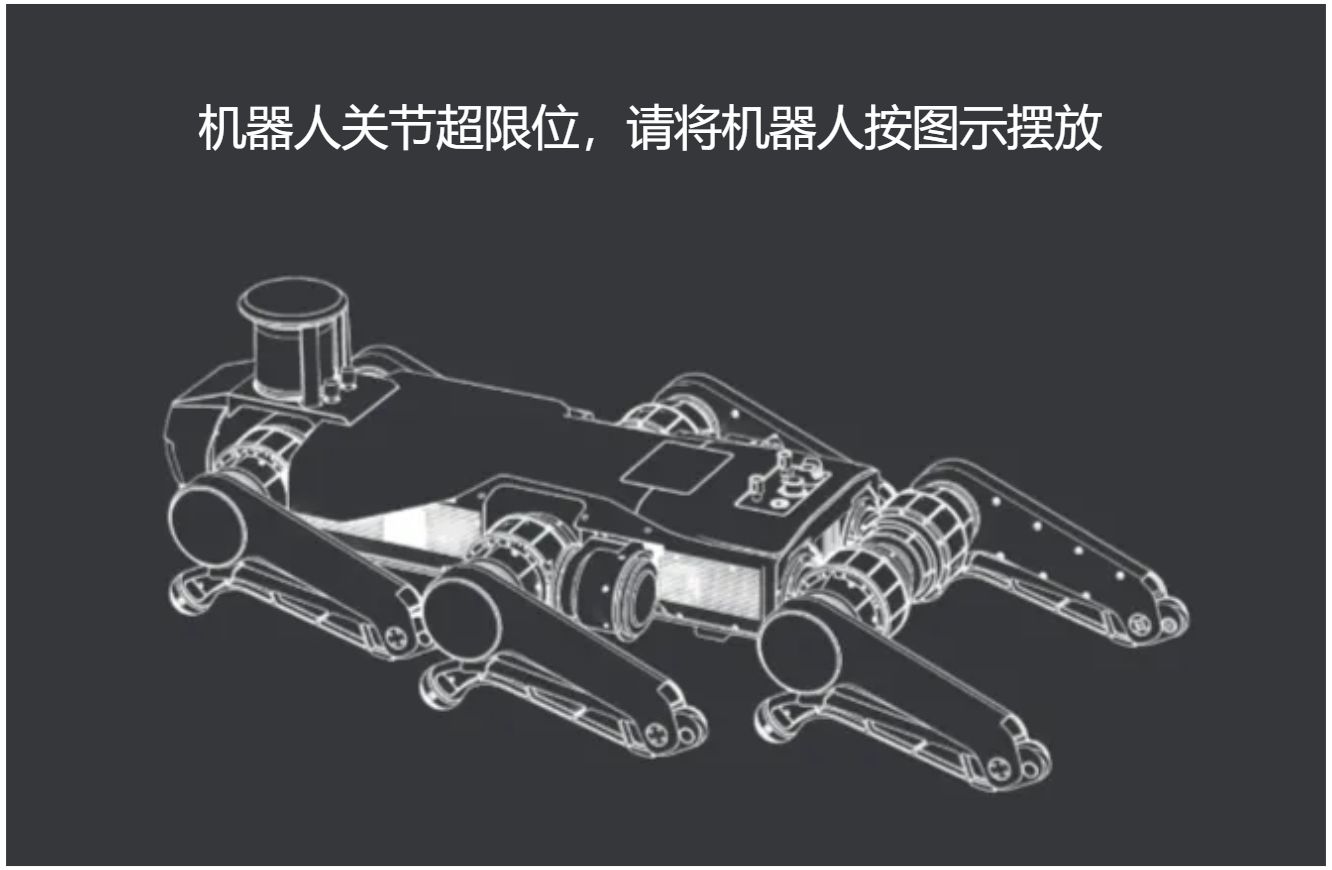
- 未按照指定姿态摆放
- 急停按钮没有亮起

应用故障
App故障,比如狗未被绑定,无法连接,或者网络异常等。
故障恢复
普通警告故障等警告工况消失后会自动消失。
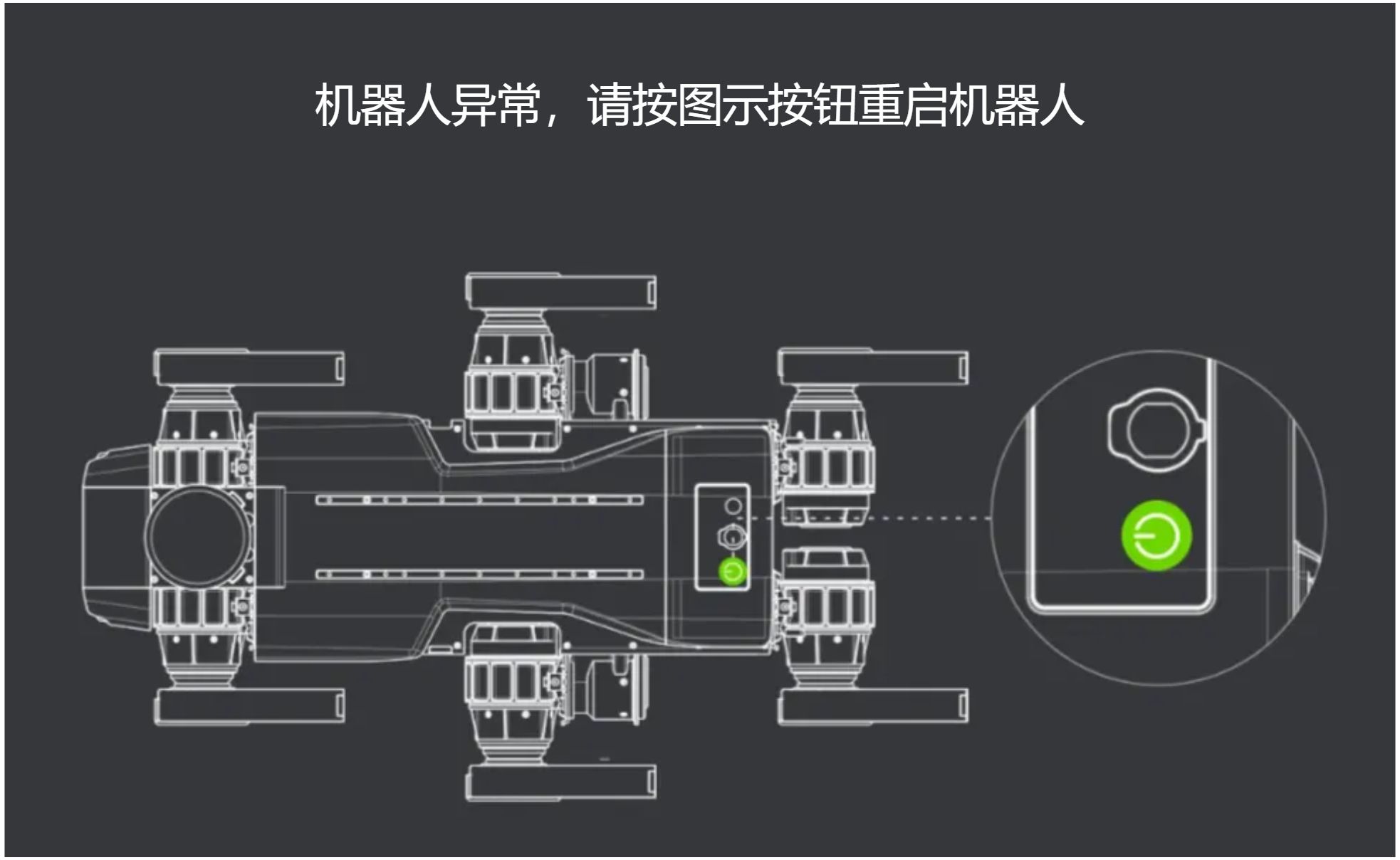
特殊故障如电机保护、主板断连等需要对狗进行重启才能恢复。
异常状态码释义表:
| 状态码 | 状态含义 | 解决方法 |
|---|---|---|
| 0xFFFFFFFF | 缺省值(正常状态) | |
| 0x00000001 | 索引值超出最小限制 | 故障代码越界,请联系原厂工程师 |
| 0x00000002 | 索引值超出最大限制 | 故障代码越界,请联系原厂工程师 |
| 0x00000003 | 驱动器上使能失败 | 检查: 1,关节位置摆放是否正确? 2,关节有无报错? 3, 当前是否在桩充电? 4,当前电量是否低于5%? 5,当前是否处于急停状态? |
| 0x00000004 | IMU数据无效,请检查IMU连接 | 1, 检查IMU与运控系统的物理连接是否正常? 2,联系工程师,检查IMU程序是否正常? |
| 0x00000005 | 关节位置超限,驱动器无法上使能,请调整关节位置 | 请将关节摆放为机器人标准的趴下姿势 |
| 0x00000006 | 请重启机器人并重新标定关节位置 | 机器人关节位置丢失,需要重启机器人进行恢复,如果重启多次后关节位置依然不对,则需要重新标定机器人的零位。 |
| 0x00000007 | 电池电量过低!需紧急停止 | 请充电。或联系厂家排查电量读取模块是否有故障? |
| 0x00000008 | 编码器错误,需重新初始化关节 | 关节编码器出现故障,需要对机器人关节进行重新初始化操作。 |
| 0x00000009 | 紧急停止已激活 | 请检查机器人身体上的硬件急停按钮,或遥控上的软急停按钮是否被按下。 |
| 0x0000000A | 趴下姿态不标准,请调整 | 机器人每次开机后,需要将其各条腿摆放到标准的趴下姿势。 |
| 0x0000000B | 驱动器上使能超时 | 请检查急停按钮是否被按下,以及机器人腿是否标准的趴下姿势?或重启机器人 |
| 0x0000000C | 自检不通过,驱动器使能失败 | 机器人关节或imu数据存在异常,请将机器人摆放到标准趴下姿势,然后重启机器人 |
| 0x0000000D | EtherCAT总线错误,请检查线路连接和驱动器 | 检查机器人对应报错关节的ECat网线连接,或排查驱动器是否正常?或重启机器人 |
| 0x0000000E | 未找到EtherCAT主站License | 请联系厂家为机器人注册EtherCat License |
| 0x0000000F | EtherCAT主站使用了无效的License | 请联系厂家为机器人注册正确的EtherCat License |
| 0x00000010 | EtherCAT帧丢失过多,导致急停 | 排查EtherCAT各关节之间的连线,重启机器人,并将Log上传给厂家排查问题 |
| 0x00000011 | 急停中,驱动器无法上使能 | 请恢复急停状态 |
| 0x00000012 | 关节超限,驱动器无法上使能 | 请将机器人腿摆放到正确的趴下姿态后,再上使能 |
| 0x00000013 | 急停中,操作失败 | 当前机器人处于急停状态,不能响应此操作 |
| 0x00000014 | 上一状态切换未完成,当前无法操作 | 等稍后再试,因为机器人当前未完成上一次状态切换 |
| 0x00000015 | 演示模式激活中,无法切换模式 | 机器人当前正在做演示动作,无法进行模式切换。请稍后再试 |
| 0x00000016 | 驱动器处于下使能,操作不被允许 | 请先给机器人上使能后再操作 |
| 0x00000017 | 机器人未处于趴下姿态,驱动器无法上使能 | 请将机器人摆放到标准的趴下姿态 |
| 0x00000018 | 关节未标定,驱动器无法上使能 | 请给机器人关节进行标零操作 |
| 0x00000019 | 编码器已重置,需重新标定 | 请为机器人重新标零 |
| 0x0000001A | 运行时自检失败,驱动无法上使能 | 请检查机器人IMU或关节力传感器是否正常 |
| 0x0000001B | 机器人未处于站立姿态,无法操作 | 请让机器人站立后做当前操作 |
| 0x0000001C | 当前步态不允许启用演示模式 | 请让机器人站立后,并切换到步行或RL步态后,再做演示动作 |
| 0x0000001D | 驱动器上使能失败,导致充电退桩失败 | 请检查急停按钮是否正常,或电量是否少于5%,或关节是否有故障 |
| 0x0000001E | 当前步态不支持上桩充电 | 请切换到步行步态或RL步态再点击上桩 |
| 0x0000001F | 上桩充电失败 | 请检查充电桩是否插电;机器人是否正确的坐到了桩上;以及机器人端是否正确打开了继电器 |
| 0x00000020 | 当前平台不支持强化学习模式 | 请不要切换到强化学习步态 |
| 0x00000021 | 当前状态不支持切换到强化学习模式 | 请不要切换到强化学习步态 |
| 0x00000022 | 机器人关节非标准趴下姿态,驱动器上使能失败 | 请将机器人摆放到标准的趴下姿态 |
| 0x00000023 | 机器人关节存在严重错误,需要趴下 | 请急停,同时记录错误,导出Log给厂家,然后重启机器人,与厂家确认后再使用 |
| 0x00000024 | 机器人处于硬急停状态,软件无法恢复急停,请检查硬件急停开关 | 请松开机器人的硬急停按钮 |
| 0x00000025 | 充电桩无法关闭,退出充电超时,请等待! | 请多等一会,最长10分钟左右会成功退桩。另外需要检查机器人上的继电器或充电桩上的继电器是否正常关闭?反馈给厂家 |
| 0x00000026 | RPS客户端异常 | RPS客户端不能正常工作,请反馈给厂家解决 |
| 0x00000027 | 电量过低,机器人不允许站立 | 请给机器人充电,当电量20%后再使用机器人 |
| 0x00000028 | 当前平台不支持驱动器重置操作 | 当前机器人不能做驱动器重置操作 |
| 0x00000029 | 当前平台驱动器不支持FOE升级 | 当前机器人不能通过FOE进行驱动器升级 |
| 0x0000002A | 机器人处于使能中,禁止重置驱动器 | 先让机器人趴下,然后下使能,之后再做重置驱动器的操作 |
| 0x0000002B | 机器人处于充电中,不响应站立指令 | 如果需要让机器人站立,请点击退桩按钮 |
关节故障码释义表:
| 故障码 | 错误含义 | 解决方法 |
|---|---|---|
| 0xFFFFFFFF | 缺省值(正常状态) | |
| 0x10000001 | 清除驱动器7303错误失败 | 请重启机器人,或在关节下使能后,对关节进行初始化(大约20分钟),之后给机器人重新标零,并重启使用 |
| 0x10000002 | 检测到驱动器错误,请检查总线状态字 | 请检查机器人出错关节的前后EtherCAT连线 |
| 0x10000003 | 驱动器过压 | 请重启机器人,如果问题一直存在,请联系厂家 |
| 0x10000004 | 驱动器处于STO状态,请释放急停按钮 | 请松开硬件急停按钮 |
| 0x10000005 | 关节位置超限 | 请将关节下使能,然后将腿摆放到正常趴下的位置后再使用 |
| 0x10000006 | 关节速度超限 | 请降低机器人的行走速度,重启机器人后再使用 |
| 0x10000007 | 关节力矩超限 | 请降低机器人的负载,对机器人温柔一点,然后重启机器人后使用 |
| 0x10000008 | 关节转动超过一圈 | 请将关节下使能,然后将腿摆放到正常趴下的位置,重启后使用 |
| 0x10000009 | 关节位置发生突变 | 请记录出错的关节序号,并将Log一起反馈给厂家 |
| 0x1000000A | 力矩传感器数据异常 | 一般是误报,只要机器人行走没有异常,就可以忽略。如果机器人走路跛脚,则需要反馈给厂家解决。 |
| 0x1000000B | 编码器BisEr故障 | 请重启机器人,在关节下使能后,对关节进行初始化(大约20分钟),之后给机器人重新标零,并重启使用 |
| 0x1000000C | 编码器BisWn故障 | 请重启机器人,在关节下使能后,对关节进行初始化(大约20分钟),之后给机器人重新标零,并重启使用 |
| 0x1000000D | 编码器电池故障 | 请更换编码器的电池,当前估计小于3.6V。换好电池后,请重启机器人,在关节下使能后,对关节进行初始化(大约20分钟),之后给机器人重新标零,并重启使用 |
| 0x1000000E | 关节电机故障(具体故障请读取子故障码) | 请记录出错的关节序号,上传Log给厂家分析。然后请重启机器人,一般可以继续使用。 |
| 0x1000000F | 关节驱动器故障(具体故障请读取子故障码) | 请记录出错的关节序号,上传Log给厂家分析。然后请重启机器人,一般可以继续使用。 |
| 0x10000010 | 关节MOSFET温度过高 | 请关闭机器人,休息20分钟以上,再使用,注意给机器人散热 |
| 0x10000011 | 关节驱动器温度过高 | 请关闭机器人,休息20分钟以上,再使用,注意给机器人散热 |
| 0x10000012 | 关节电机温度过高 | 请关闭机器人,休息20分钟以上,再使用,注意给机器人散热 |
| 0x10000013 | 关节清除急停失败 | 请记录出错的关节序号,上传Log给厂家分析。然后请重启机器人,一般可以继续使用。 |
备注:
1. 错误信息接口中 Joint Index 参数代表关节编号。
2. 关节电机和驱动器的具体故障可进一步获取子故障码。
3. 子故障码为0xFFFFFFFF或者关节编号为-1时可以忽略。