Motion Services
Robot Coordinate System
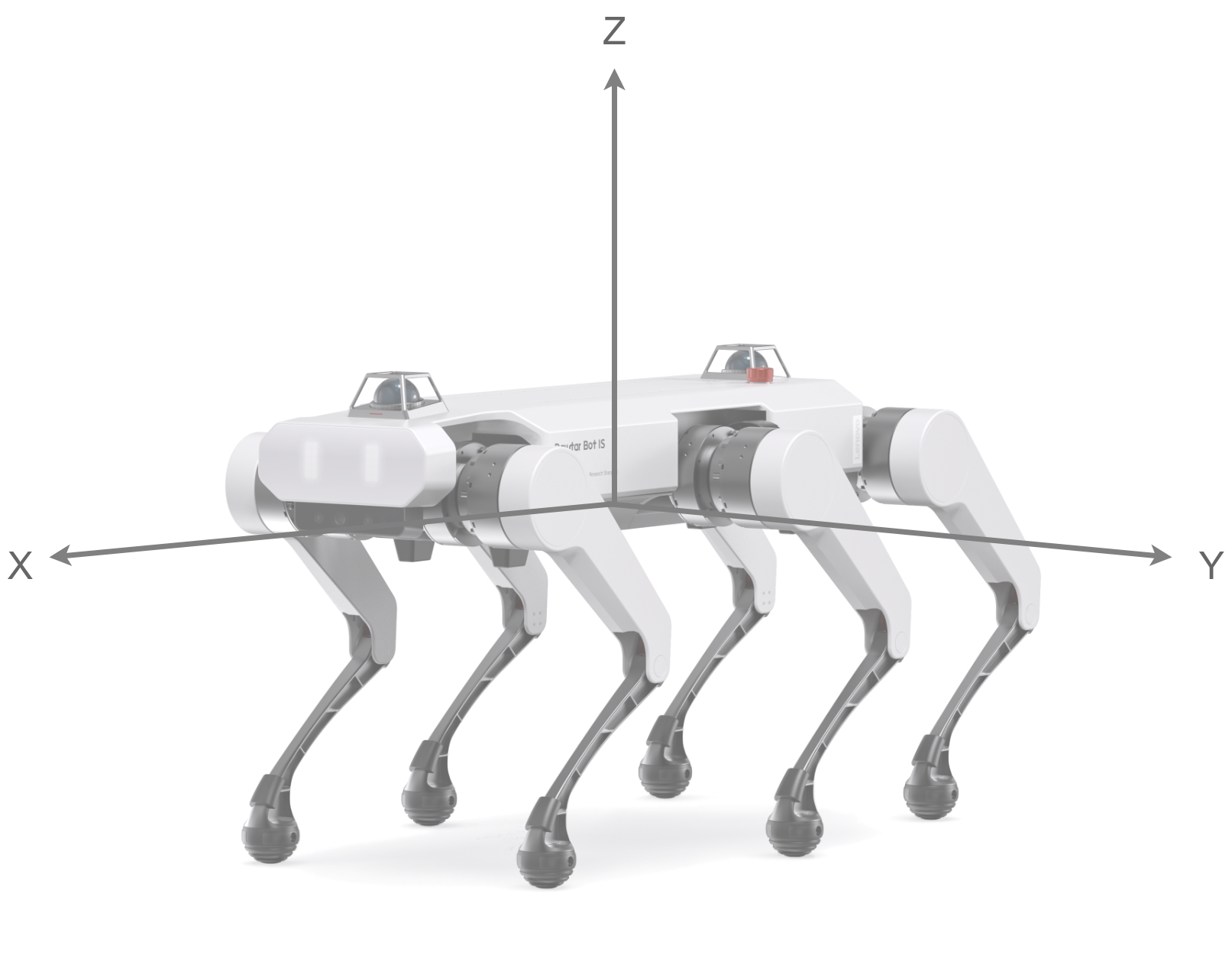
The robot's coordinate system is defined as:
- X-axis: Forward direction
- Y-axis: Left direction
- Z-axis: Upward direction
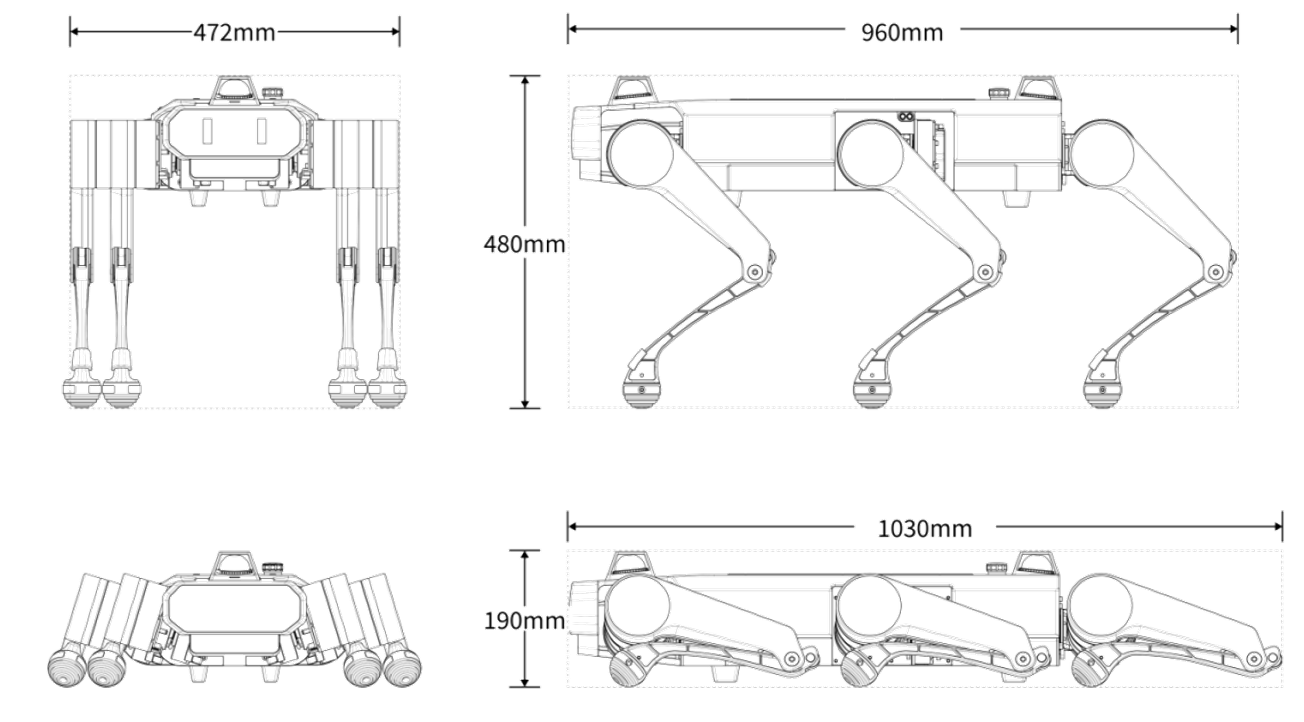
Robot Default Heights
- Standing Height: 0.48m (ground clearance)
- Crouching Height: 0.19m (ground clearance)
Motion Control Service
Call corresponding APIs to activate different movement modes:
- Navigation Mode (Autonomous path following)
- Joystick Mode (Manual remote control)
- Following Mode
Terrain-adaptive gait switching is supported via API calls based on:
- Ground conditions (grass/gravel/stairs)
- Mission requirements
Execute built-in special motions through APIs including:
- Hand waving
- Head shaking
- Tail wag
Movement Mode
| Movement mode | Description |
|---|---|
| Joystick Mode | The robot moves according to real-time remote control signals from the joystick controller |
| Navigation Mode | The robot autonomously navigates along a preconfigured route |
| Following Mode | The robot follows dynamic UWB signals |
Movemnet Scene(Gait)
| Gait Type | Description |
|---|---|
| Walking Gait | Default locomotion pattern for flat terrain and normal operation |
| Stair Gait | Specialized gait for complex terrains including stair climbing and obstacle negotiation |
| Slope Gait | Adaptive gait for inclined surfaces up to 30° slope angle |
Demo Action
The Motion Service provides multiple built-in actions that can be choreographed as needed. Below are the special actions and their execution processes.
| Action | Execution Process | Diagram |
|---|---|---|
| Wave | > 1.Standing posture 2. Call action server API (Wave) 3. Robot performs action 4. Action completed 5. Return to standing |  |
| Head Shake | > 1. Standing posture 2. Call action server API (Head Shake) 3. Robot performs action 4. Action completed 5. Return to standing |  |
| Tail Wag | > 1. Standing posture 2. Call action server API (Tail Wag) 3. Robot performs action 4. Action completed 5. Return to standing |  |