SLAM Navigation Services
Navigation Principles
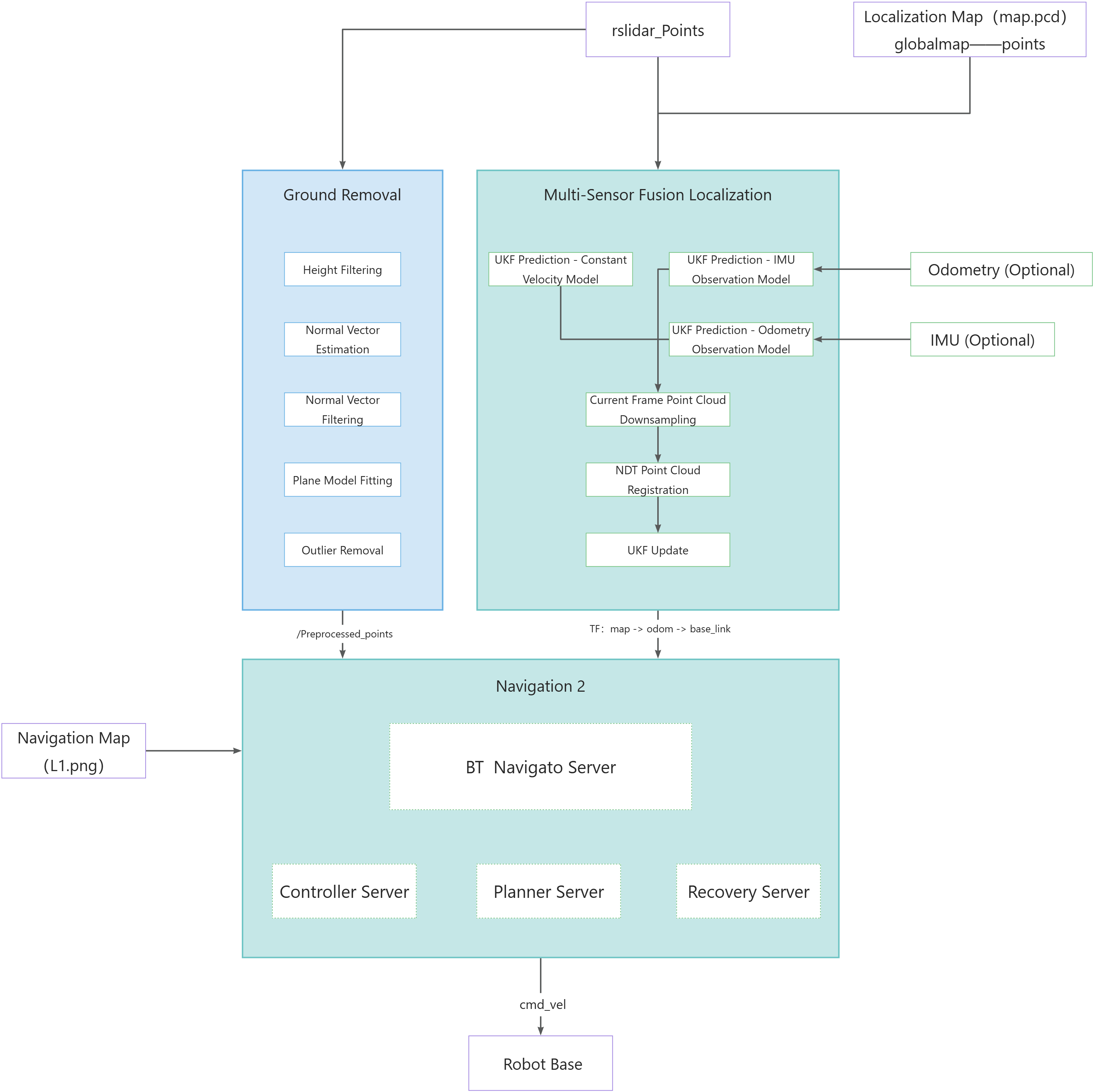
The navigation system primarily consists of three components: localization, planning, and control. These modules work in coordination to ensure the robot achieves autonomous navigation in complex environments. The system relies mainly on sensors including Livox LiDAR and inertial measurement units (IMU), while its input information includes PCD-format localization maps, PNG-format navigation maps, task target points, etc.
The localization module employs sensor fusion technology to ensure the robot obtains precise positional information in real time; the planning module generates feasible paths based on navigation modes and localization data; the control module is responsible for converting these paths into specific motion commands that drive the robot to complete its tasks.
Localization Process
The primary function of the localization module is to determine the robot's precise position in its environment in real time. The module receives point cloud data from the Livox LiDAR mounted on the robot and pose data from the IMU. Through sensor fusion technology, these data are matched with the pre-loaded PCD localization map to obtain the robot's current position information. The coordinate transformation relationships among map, odom, and base_link frames are then published via the TF tree, ensuring coordinate system consistency across all modules.
After launching the localization node, the robot's initial pose must be specified in RViz to quickly acquire its positioning information in the environment, thereby supporting subsequent navigation tasks. Once the initial pose is sent, the sensor data from the LiDAR and other devices will be matched with the map saved during the point cloud map construction process to complete pose calculation. At this point, the system will display TF transformations in the map coordinate frame, indicating that the robot has successfully localized itself.
Motion Planning and Control Process
The planning module and control module form the navigation system's motion planning and control process, responsible for generating and executing the robot's movement path.

Planning Module
The planning module selects an appropriate planner based on the navigation mode (patrol mode/intelligent navigation mode). By integrating positioning information from the localization module and the PCD localization map, it generates a navigation path from the robot's current position to the target point. This path must account for both static obstacles in the environment and dynamically avoid moving obstacles to ensure feasibility and safety.
Control Module
The control module receives the navigation path generated by the planning module along with real-time positioning data from the localization module. Using this information, it generates linear and angular velocity commands that comply with the robot's motion constraints. These commands are transmitted via the cmd_vel topic to the robot's controller host for execution, driving the robot along the planned path. Additionally, the control module continuously monitors the robot's movement state to ensure accurate path tracking, making dynamic adjustments when necessary to adapt to environmental changes or unexpected situations.