SLAM navigation Service
Navigation Principle
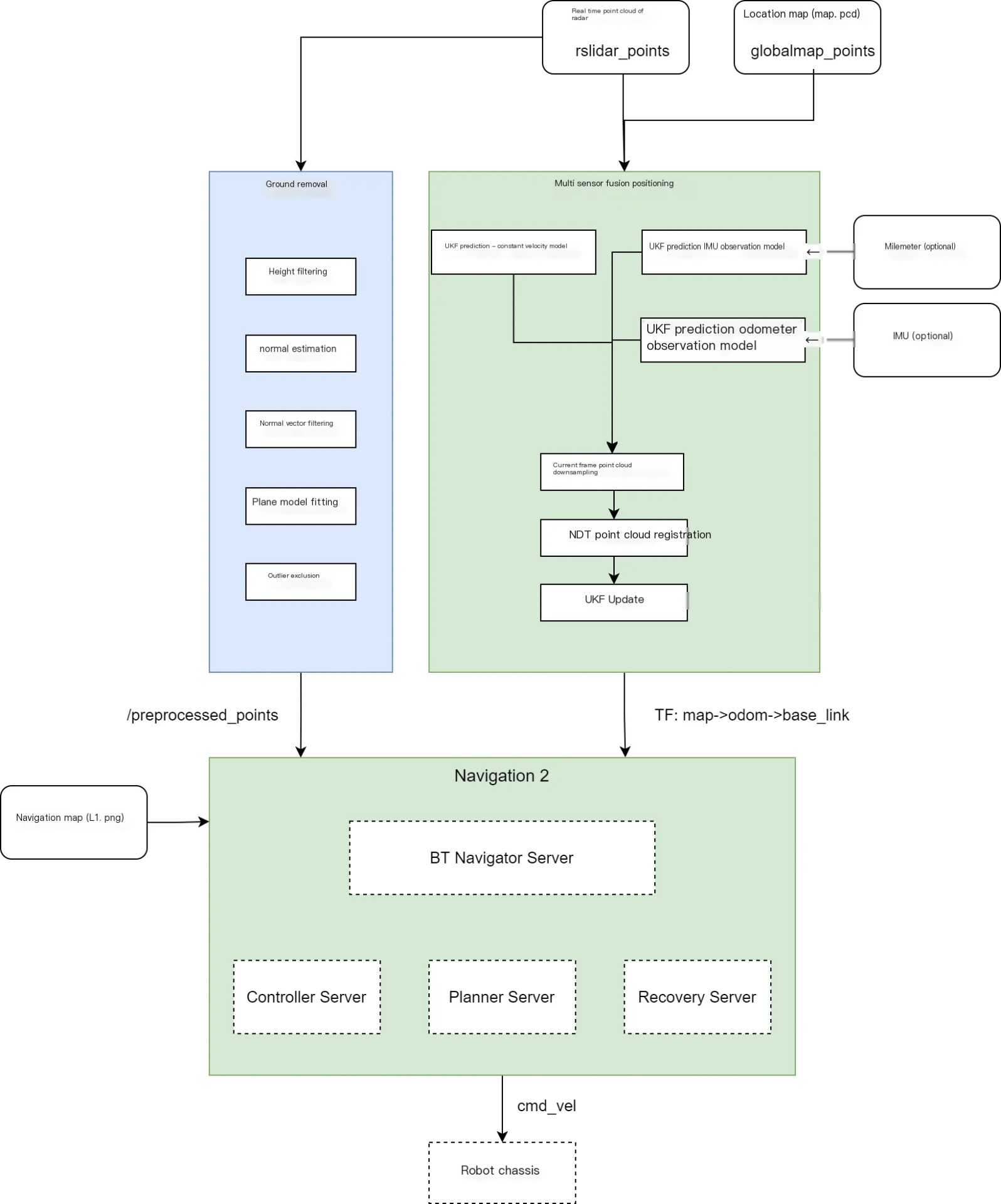
The navigation system is mainly composed of three parts: positioning, planning and control. These modules work together to ensure that the robot can achieve autonomous navigation in complex environments. The sensors that the system relies on mainly include Livox lidar and inertial measurement unit (IMU); The input information covers PCD format positioning map, PNG format navigation map, mission target point, etc.
The positioning module ensures that the robot can obtain accurate position information in real time through sensor fusion technology, the planning module generates a feasible path according to the navigation mode and positioning information, and the control module is responsible for converting the path into specific motion instructions to drive the robot to complete the task.
Positioning Process
The main function of the localization module is to determine the precise position of the robot in the environment in real time. The module receives the radar point cloud data obtained by The Livox lidar carried by the robot and the pose data obtained by IMU. Through sensor fusion technology, these data are matched with the pcd positioning map passed in from the upper layer, so as to obtain the position information of the current robot. And in the way of TF tree map , odom and base_link the coordinate transformation relationship between the modules is published to ensure the consistency of the coordinate system between the modules.
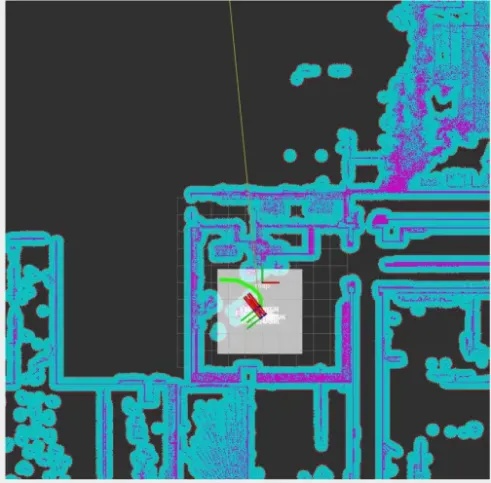
After the localization node is started, the initial pose of the robot needs to be specified in Rviz to help the robot quickly obtain its own localization information in the environment and provide support for subsequent navigation tasks. Once the initial pose is sent, the perception data of sensors such as lidar will be matched with the map saved during the point cloud map construction process, and the pose calculation will be completed. At this point, the system displays the TF transform in the map coordinate system, indicating that the robot has been successfully positioned.
Regulatory Process
The planning module and the control module together constitute the regulation process of the navigation system, which is responsible for generating and executing the motion path of the robot.
Planning Module
The planning module selects the corresponding planner according to the navigation mode (Patrol mode/intelligent navigation mode), and generates a navigation path from the current position of the robot to the target point by combining the positioning information provided by the positioning module and the pcd positioning map. This path not only needs to consider the static obstacles of the environment, but also needs to avoid moving obstacles dynamically to ensure the feasibility and safety of the path.
Control Module
The control module receives the navigation path generated by the Planning module and the real-time positioning information provided by the positioning module. Based on this information, the control module generates linear and angular velocity commands that conform to the robot motion constraints. These instructions are passed through cmd_vel the topic is passed to the robot's chassis for execution, thereby driving the robot to move along the planned path. The control module also needs to monitor the robot's motion status in real time to ensure that it can accurately track the path and dynamically adjust when necessary to respond to environmental changes or emergencies.