Sports Services
Robot Coordinate System
The coordinate system of the robot is defined as: X facing forward, Y facing left, and Z facing up.
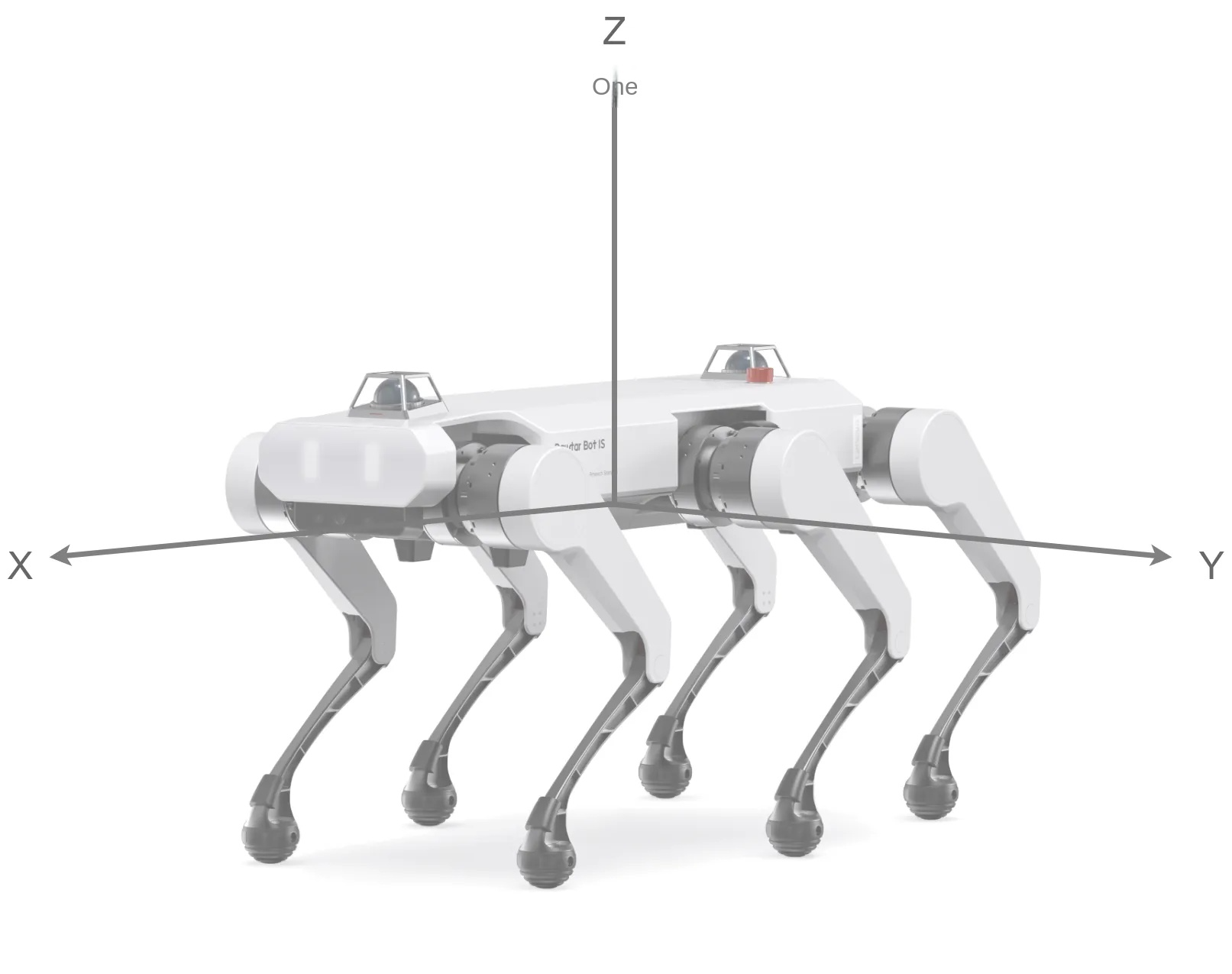
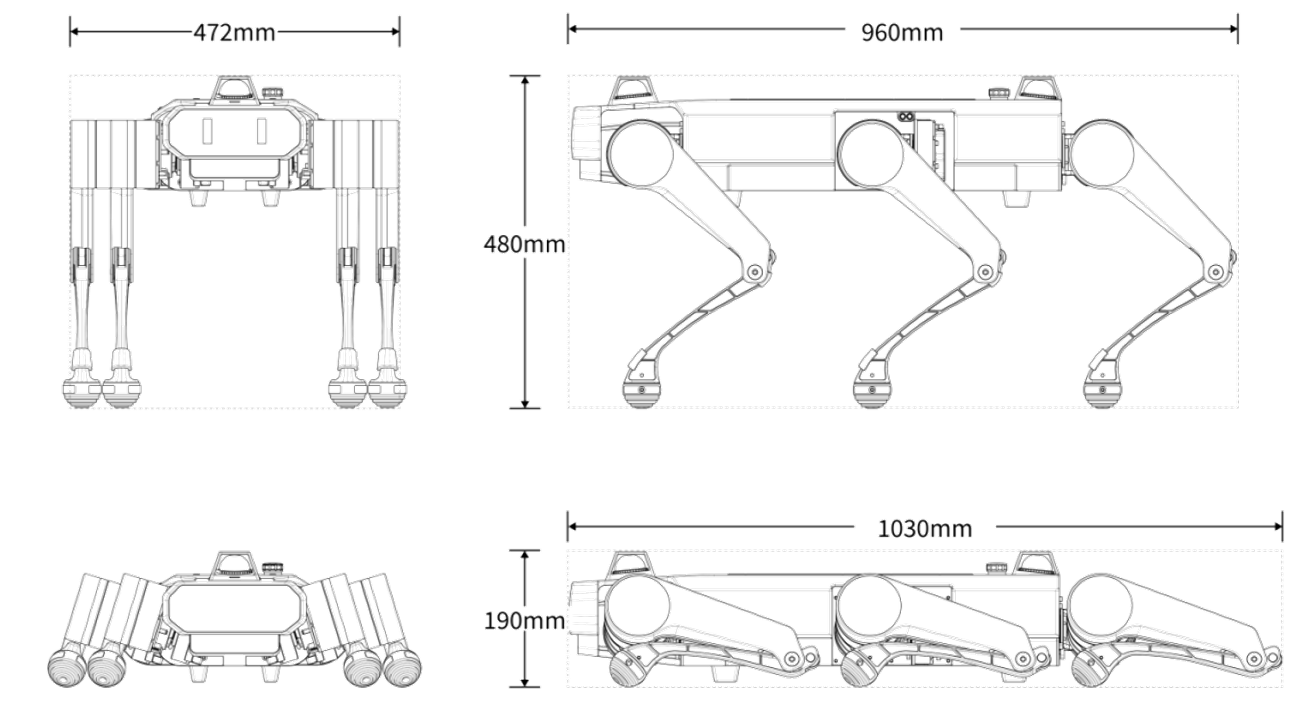
The default height of the robot is 0.48m when standing and 0.19m when lying down
Robot Motion Control
In the motion control service, the corresponding interface can be called to realize the navigation mode, handle mode and other different motion modes of the robot, and at the same time, the interface can be called to switch the walking gait of the robot according to different terrain scenes and task requirements. In the demonstration action control service, the corresponding interface can be called to realize the built-in special actions of the robot, such as waving and shaking the head.
Movement Mode
| motion Control Mode | description |
|---|---|
| handle mode | the robot walks according to the remote control signal of the handle |
| navigation mode | the robot follows a given route. |
| Follow mode | the robot walks according to the UWB signal |
Motion Scene (gait)
| Robot gait | description |
|---|---|
| walking Gait | this gait is the regular gait of the robot and is used for general road surfaces. |
| Stair gait | the gait can adapt to more complex terrain, and realize the functions of climbing stairs and obstacle crossing. |
| Ramp gait | the gait can adapt to a certain angle of slope terrain |
Demo Action
The motion service provides a variety of built-in actions that can be choreographed as needed. The following are the built-in special actions and related descriptions.
| Special Movements | action execution process | schematic Diagram |
|---|---|---|
| beckoning | 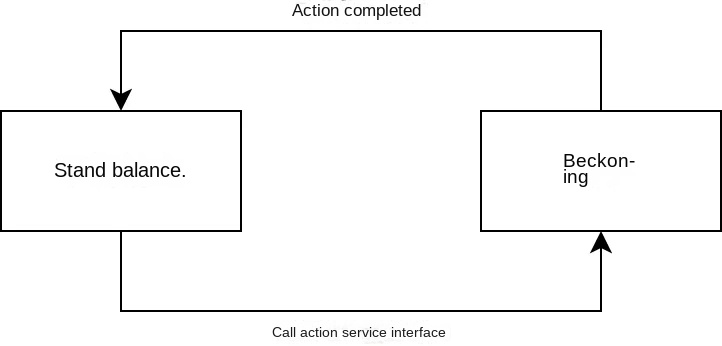 |  |
| shake your head | 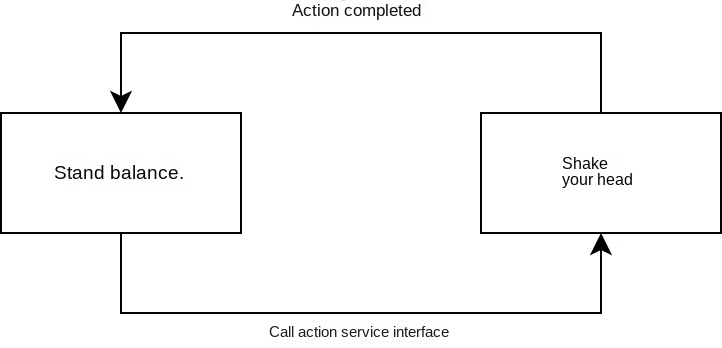 |  |
| swing Tail | 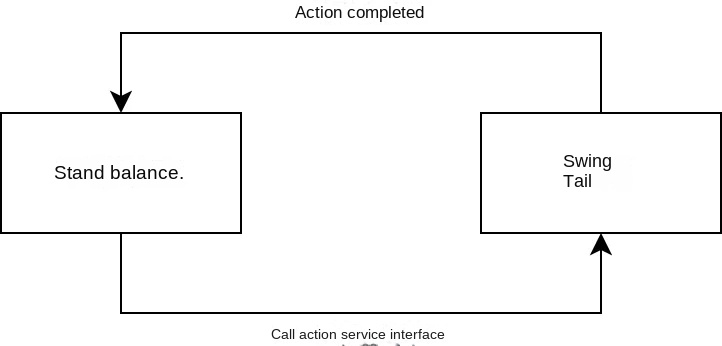 |  |