运动服务
机器人坐标系
机器人的坐标系定义为:X 朝前,Y 朝左,Z 朝上。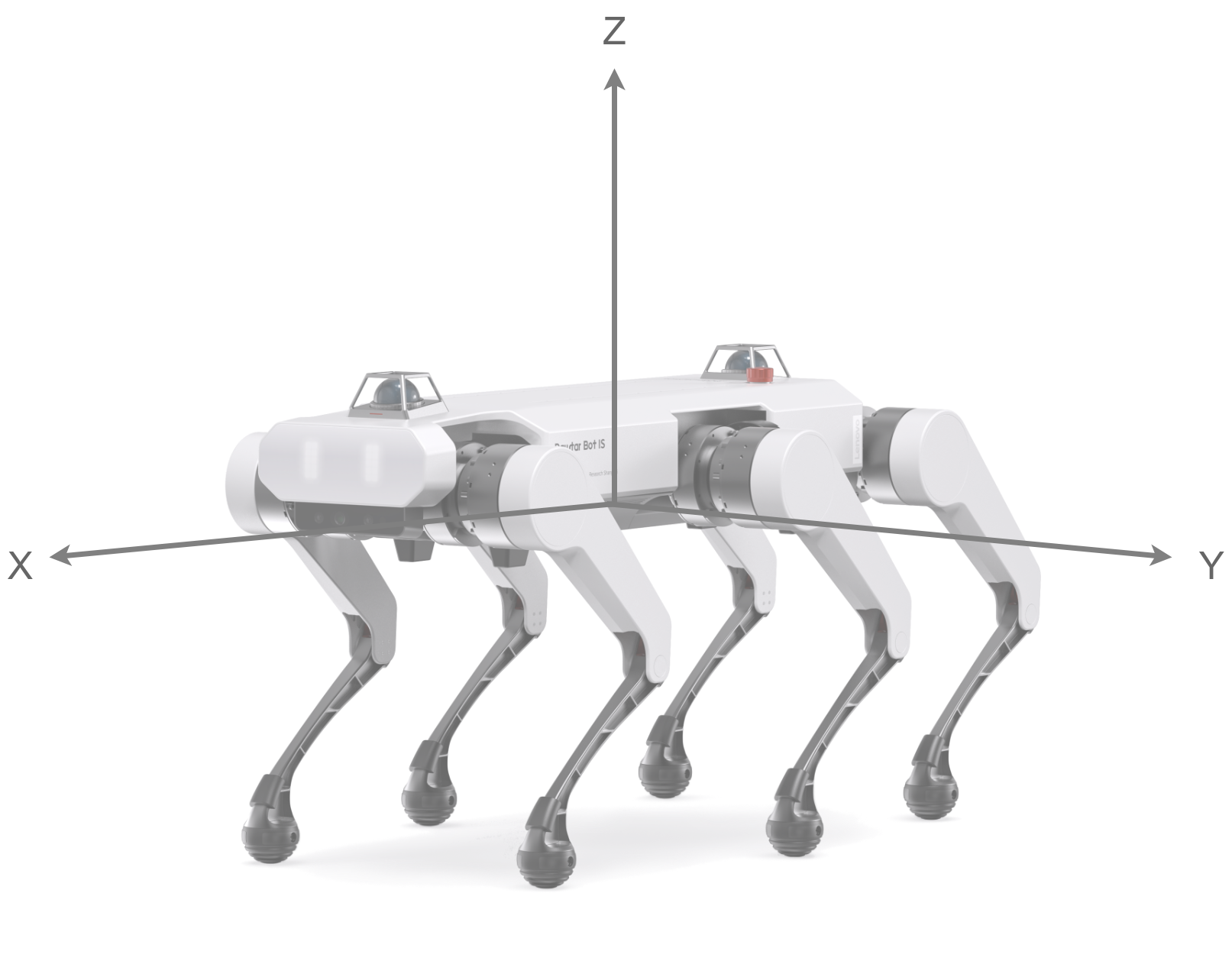
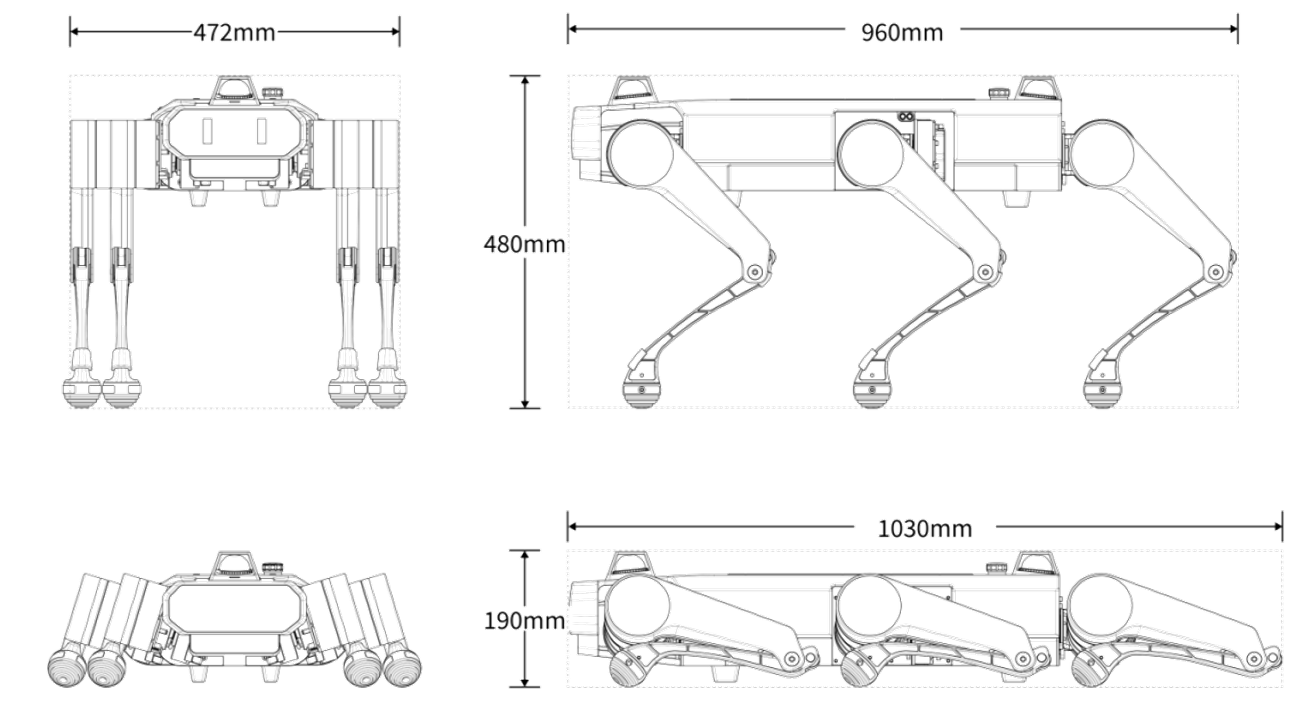
机器人站立时的默认离地高度为 0.48m,趴下时高度为0.19m
机器人运动控制
在运动控制服务中,可调用相应的接口实现机器人的导航模式、手柄模式等不同的运动模式,同时还可以根据不同的地形场景和任务需求调用接口切换机器人的行走步态。演示动作控制服务中,可调用相应的接口,实现机器人内置的特殊动作,如招手、摇头等。
运动模式
| 运动控制模式 | 说明 |
|---|---|
| 手柄模式 | 机器人按照手柄的遥控信号行走 |
| 导航模式 | 机器人按照给定的路线行进 |
| 跟随模式 | 机器人按照UWB信号行走 |
运动场景(步态)
| 机器人步态 | 说明 |
|---|---|
| 行走步态 | 该步态为机器人常规步态,用于一般路面 |
| 楼梯步态 | 该步态能够适应更加复杂地形,实现爬楼、障碍翻越等功能。 |
| 斜坡步态 | 该步态能够适应一定角度的斜坡地形 |
演示动作
运动服务提供了多种内置的动作,可根据需要对动作进行编排。以下是内置的特殊动作和相关描述。
| 特殊动作 | 动作执行过程 | 示意图 |
|---|---|---|
| 招手 | 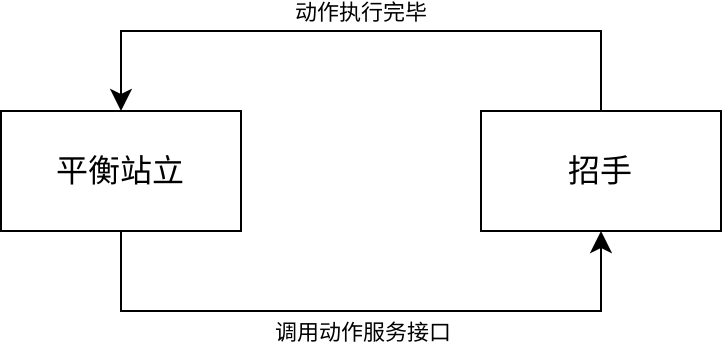 |  |
| 摇头 | 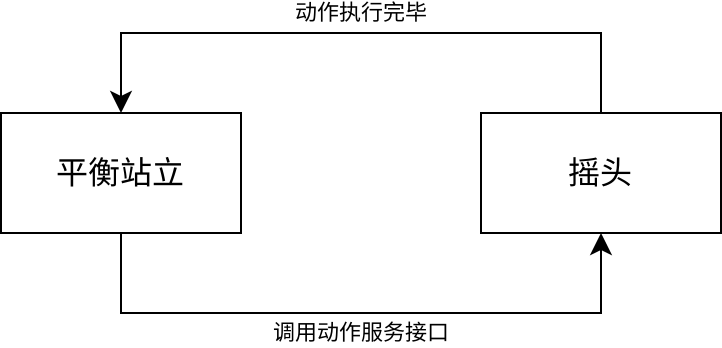 |  |
| 摆尾 | 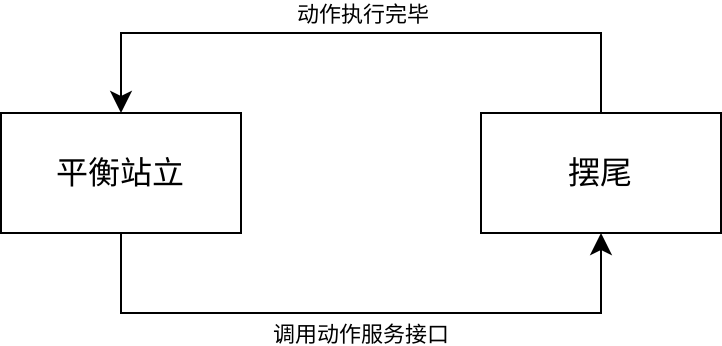 |  |