LiDAR服务
概述
基于LiDAR(激光雷达)设备, 通过高精度环境感知和实时数据处理,确保机器人在运动过程中及时检测到障碍物实现停障功能。
LiDAR服务所使用的激光雷达为Livox Mid-360, 是一款高性价比、安全可靠的激光探测测距仪传感器,可探测最近距离 0.1 米、最远距离 100 米的物体,采用巧妙而可靠的光学和结构设计实现了非重复扫描,能探测更丰富的细节,适应不同的应用场景,能够支持建图、定位、识别、避障等功能的工业实现。
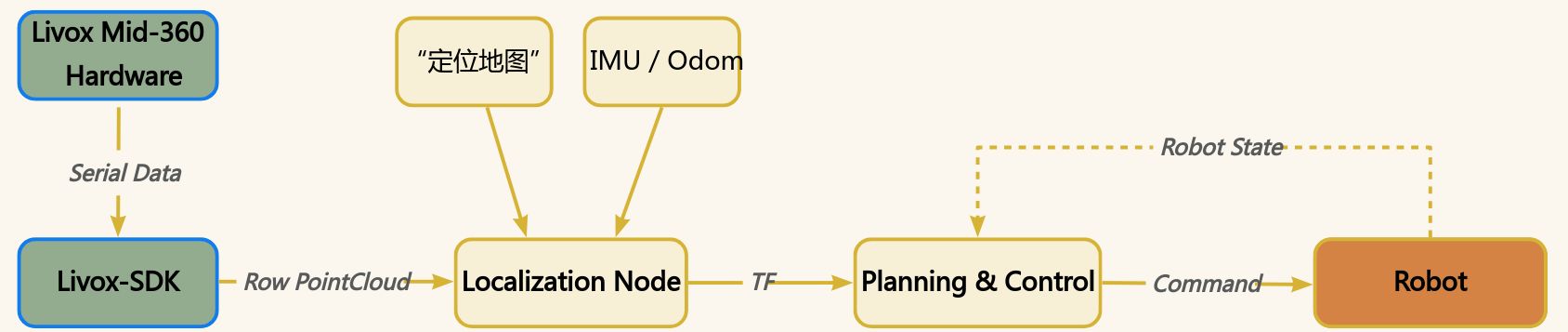
LiDAR服务的系统架构如下图所示。
- Livox-SDK 通过串口从 Livox Mid-360 硬件中获取原始测量数据包,并将其解析成点云数据。
- Unilidar Node 模块通过 Unilidar SDK 获取解析后的点云数据。
- 定位模块接收点云数据、定位地图及IMU / Odom数据,通过传感器融合获取机器人坐标转换关系。
- 规划及控制模块基于定位信息及机器人状态信息,求解控制指令,最终控制机器人运动。
Lidar 配置
尺寸与布局
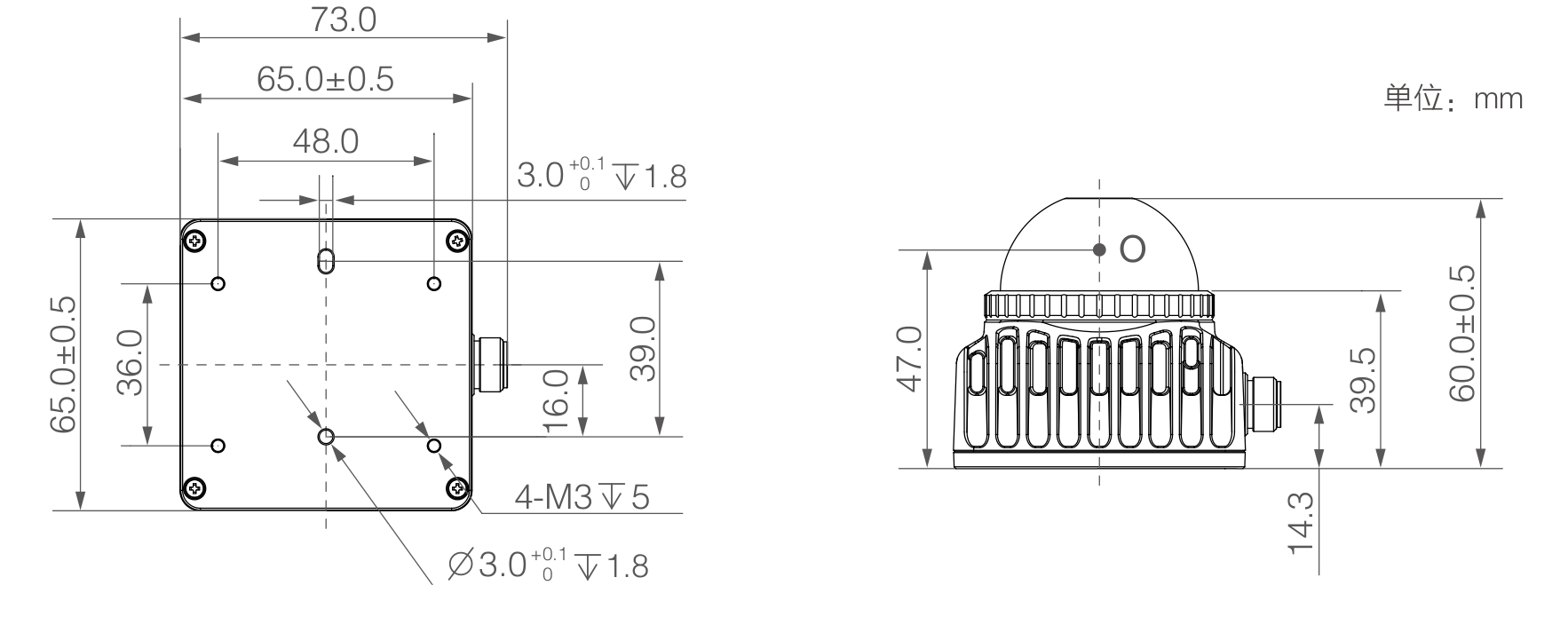
Livox Mid-360 的尺寸大小及安装孔位尺寸如下图所示。
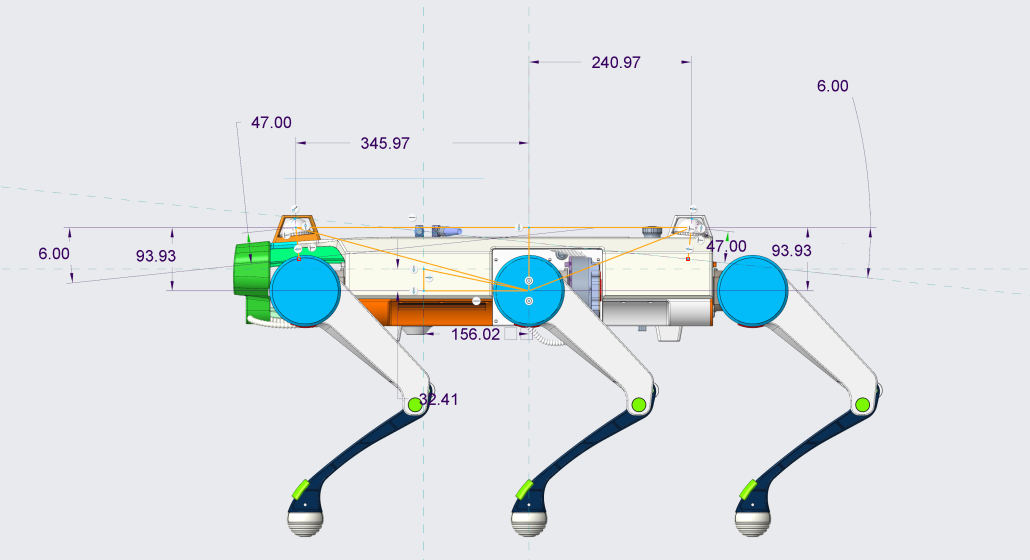
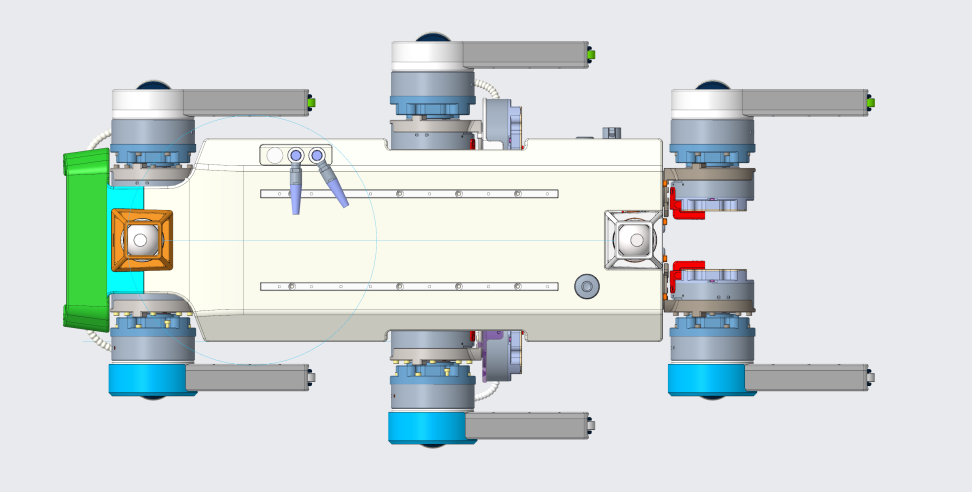
在 IS 机器人中,共装配有两颗 Livox Mid-360 前后雷达,其布局位置如下图所示。
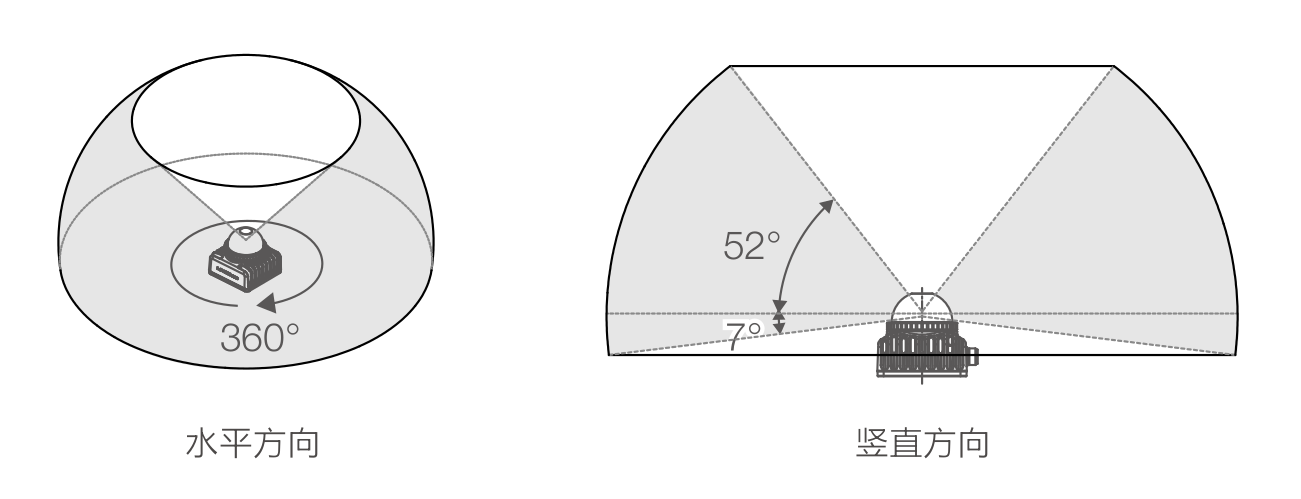
有效视场角(FOV)范围
Mid-360 的 FOV范围如下图所示,其水平为 360°,竖直最大为 59°,其有效量程在不同的 FOV 区域内有所区别:在竖直方向的 FOV 范围内,越靠近上方有效量程越短,越靠近下方有效量程越长。
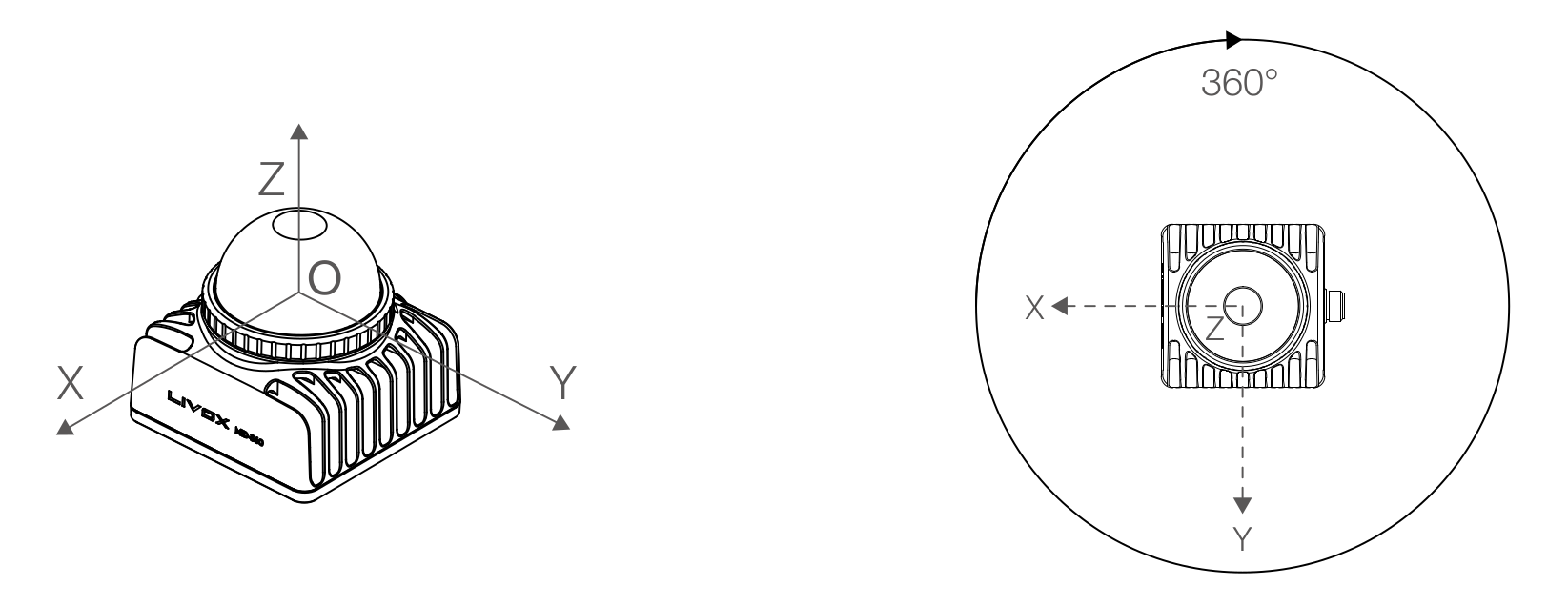
点云坐标系
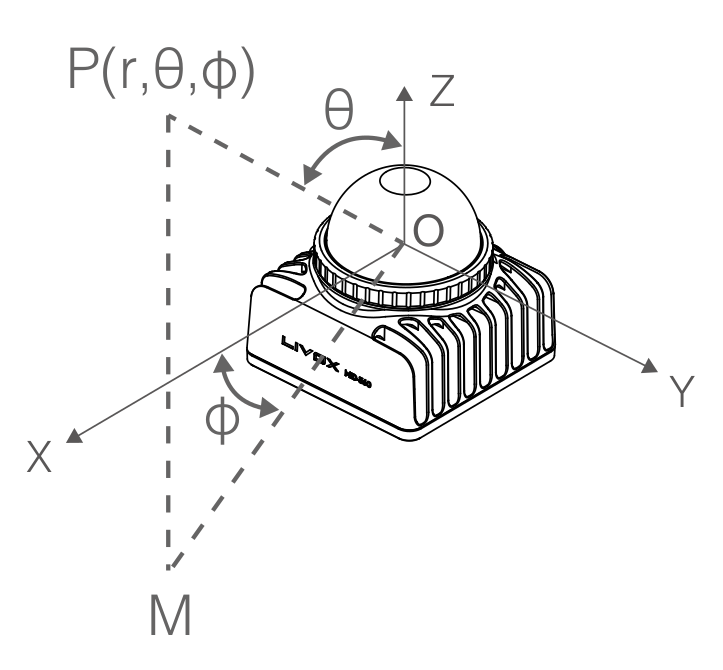
Livox Mid-360 的直角坐标 O-XYZ 的定义如下:点 O 为原点,O-XYZ 为其点云坐标系,各坐标轴方向如图所示。
点云数据
默认情况下,Mid-360 上电后即开始输出点云数据,点云数据中包括时间戳、目标反射率、坐
标信息及标记信息。其中,Mid-360 的坐标信息可表示为直角坐标系(x, y, z)或球坐标系(r, θ, φ),其直角坐标和球坐标的对应关系如下图所示,坐标转换关系可描述为:
如果前方无被探测物体或者被探测物体超出量程范围(如>100 m),在直角坐标系下,点云输出为;在球坐标系下,点云输出为。
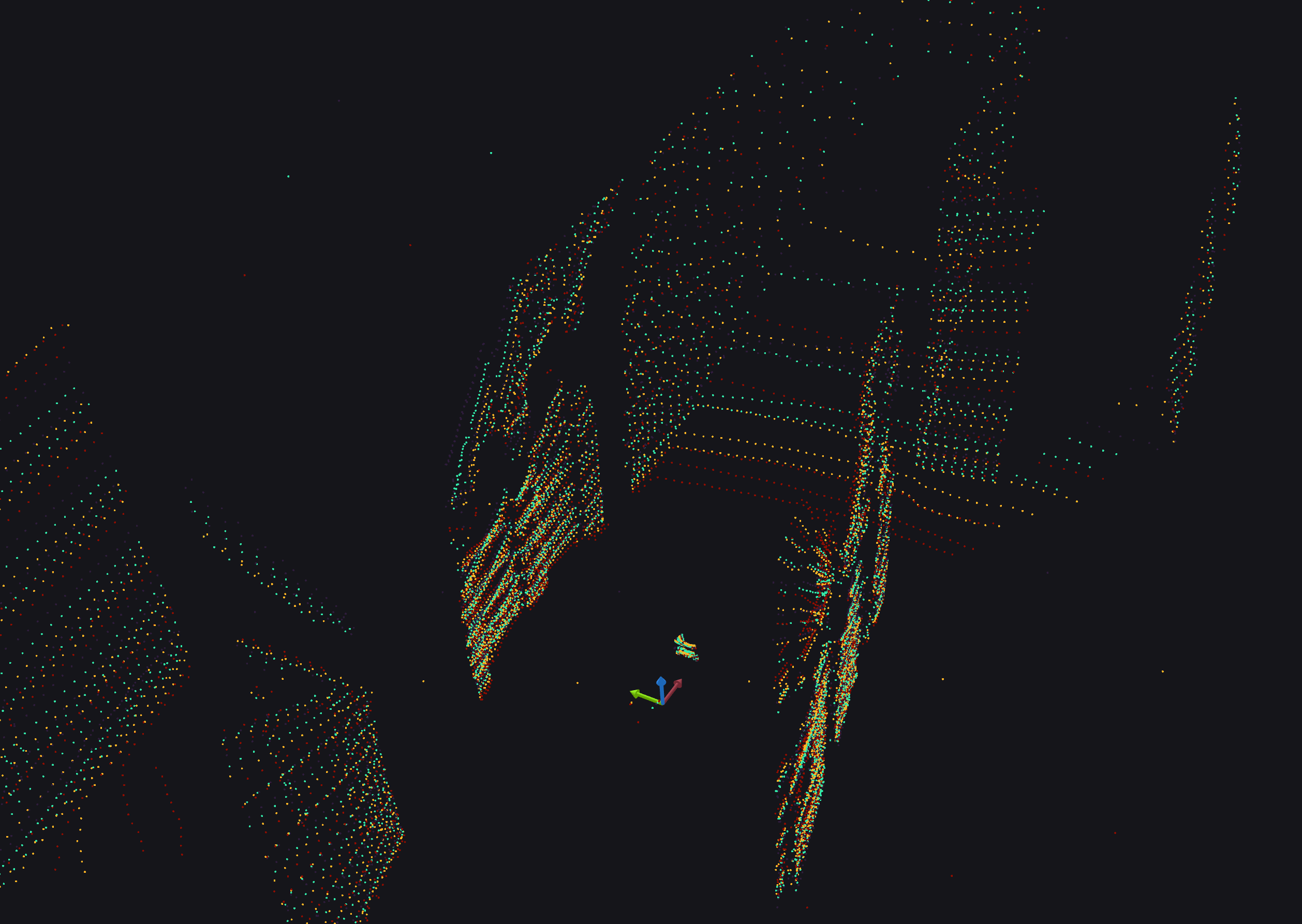
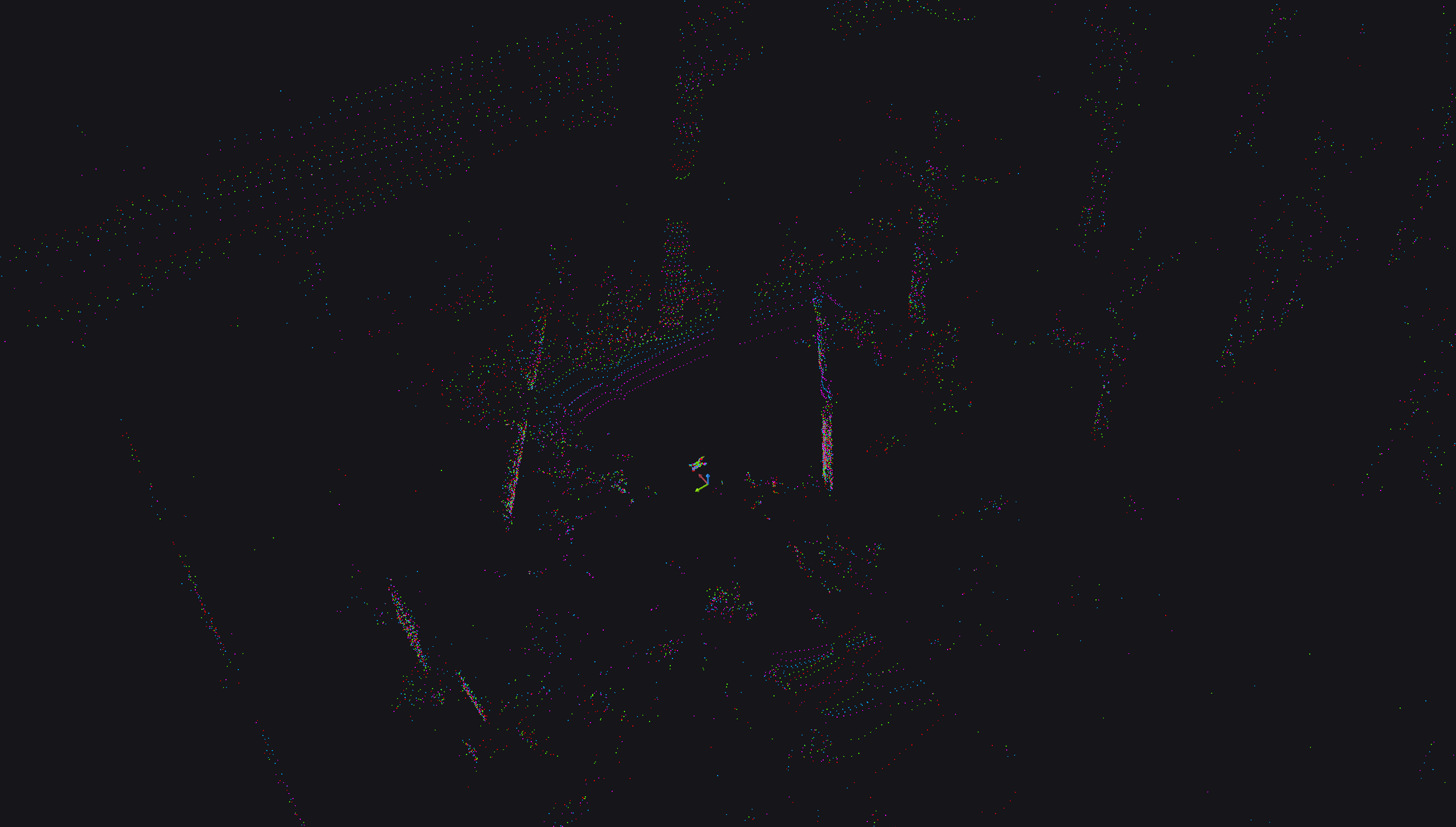
IS 机器狗开机会自动启动激光雷达的相关程序,并将激光雷达采集的点云发布到 DDS 话题。下图为不同场景在近、远两种视角下观察的 IS 前后两雷达采集的原始点云。